
您對機器人的印象是這樣的嗎?

不是的,我們今天要介紹的主題是【工業機器人】
本篇要介紹的主題是工業機器人,如果您在閱讀之前,對工業機器人的認知覺得應該會是人形的長相,代表您對現存容易見到的工業機器人還沒有相當的接觸及經驗,恭喜這篇文章會對您有所幫助。
工業機器手臂的三大印象
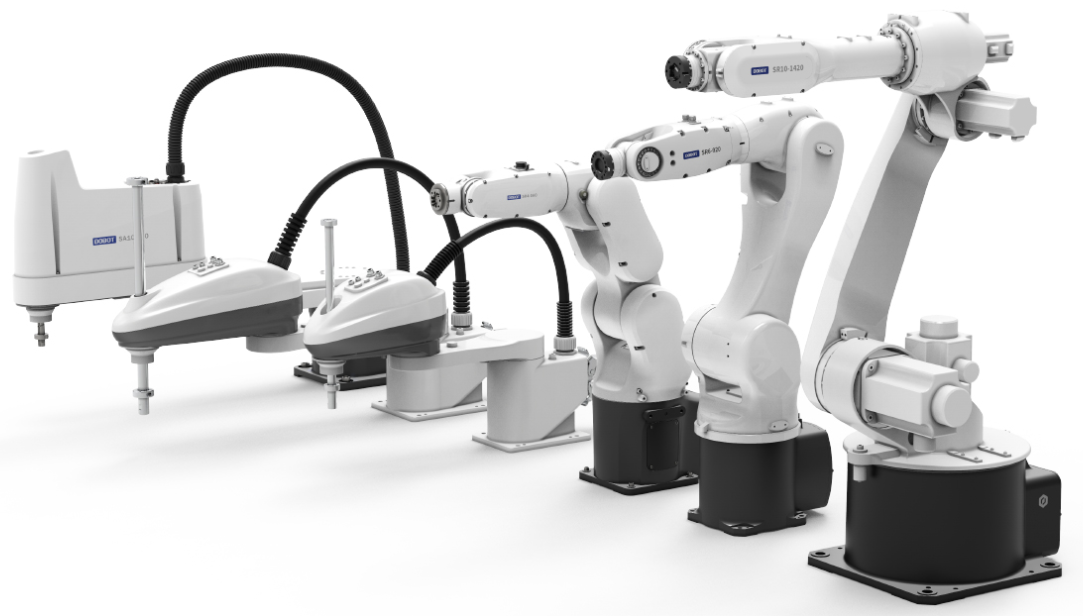
我們除了不打算提人形機器人以外,更把機器人的範圍縮小到【手臂】這種造型。所以,我們通常稱的工業機器人,指的是用在工業領域的、機械型態的手臂,簡稱機器手臂,它們代替人的手臂,進行各種需要高負重、高精密度等等人力不容易實現的製造、加工、搬運等動作。
在進入正式的介紹之前,您需要對工業機器手臂有三大印象,分別為
- 馬達 + 多關節機械
- 機器手臂的外型由多個關節所組成,各關節有各自的電動馬達帶動,使得它能夠做靈活且複雜的動作。
- 可程式控制
- 機器手臂產品必須要提供讓使用者能輕易上手、開發、設計手臂動作的軟體,以進行想要做的任務。
- 自動化生產線
- 既然叫做工業機器手臂,它最常見的應用場所就是自動化生產線,無論是電子、半導體、金屬加工及各式各樣的製造工序或搬運流程,都有它的影子。
工業機器手臂的外觀組成

工業機器手臂通常由【機器手臂本體】及【控制器】兩大單元組成,當然,也有少數比較小型、輕量化的機器手臂產品,走 All-In-One 的設計風格,將控制器與手臂本體設計在一起的機種。
機器手臂的本體指的是我們直觀看到的,具有手臂、關節的部分,內部裝載著馬達及減速機等等機械結構。
機器手臂的控制器就是是它的運算電腦,通常默默地在背後工作著,我們平常不會注意到它的存在,但它負責做運動控制計算、儲存資訊,以及進行外部通訊的動作,例如 I/O、網路等等,也相當的重要。

部分的機器手臂產品廠商,會一併推出所謂的 Teach Pendant 產品配件,稱作教導器、教導盒、或示教器,它是一個可供連接在機器手臂控制器上的手持遙控裝置,讓操作者在一時沒有另外準備電腦透過專用軟體去連線進去機器手臂操作的環境下,可以暫時將 Teach Pendant 用專用連接線插到控制器上面去,進行手臂的點位教導、座標校正、調整設定,甚至利用 Teach Pendant 上的觸控螢幕來編輯程式。
Teach Pendant 上會有 EMO (緊急停止) 按鈕,以及 Deadman Switch (死人開關),保護操作者的安全。手持 Teach Pendant 的操作人員時常會因校正需要,站得離機器手臂非常靠近,這樣比較看得清楚位置正不正確,但機器手臂的力量很強,故操作者手上的保護裝置可以讓發生危險的當下可以迅速讓機器手臂停下來。
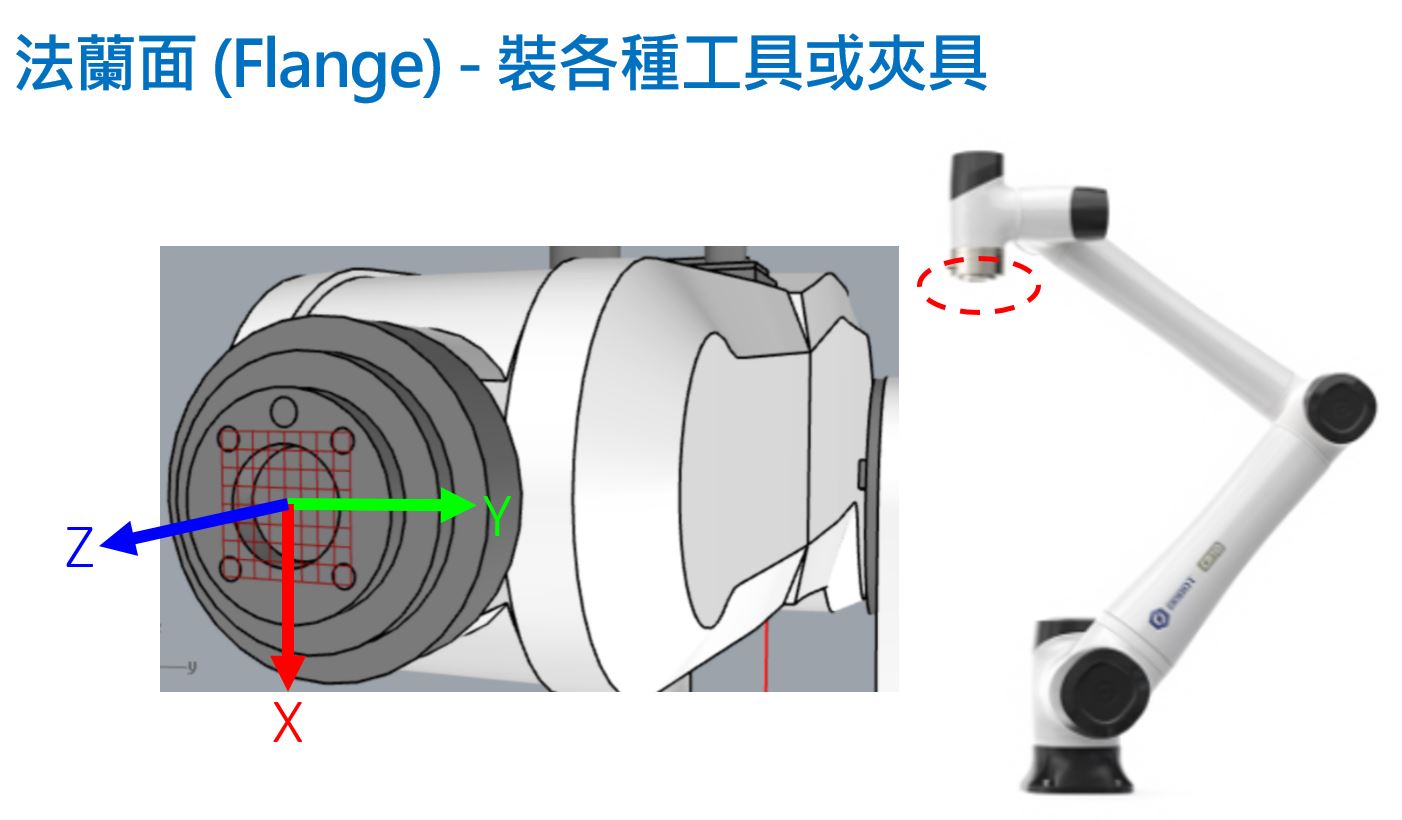
機器手臂之所以在工業自動化領域非常好用,是因為它可以安裝各式各樣的工具頭 (Tool)。
裝設工具頭的介面結構,叫做 Flange (法蘭面),只要尺寸、重量符合該機器手臂的規格,機器手臂可以裝上夾爪、吸盤、焊槍、噴嘴等等,各式各樣的工具頭。
【拿】著不同的工具頭,機器手臂可以在工廠中扮演不同的角色。
為什麼要用機器手臂?
一般在設計工廠自動化的時候,您會有兩種思路。
設計專用的機械
這是一個專門設計為了將成堆擺放的紙張,利用摩擦力的原理,一張一張按照順序發入生產流水線的小型設備。由於物料在存放時通常會排列整齊並成堆包裝,這樣比較省空間,但後續的生產流水線都是直線排列,這樣才能經過一道道的工序,例如印刷、檢查、貼標等等。
這是一個【上下料搬運】的行為,設計專用機械會有以下優缺點:
【優點】專門針對特定任務在處理及設計,可以將產出最佳化、速度快
【缺點】彈性差,因為是專用機,所以只能使用於特定產品及尺寸,若產品差異超過使用範圍,可能整部機械都要重新設計,重新投入生產的時間非常的長,故需要事先做好妥善的規劃。若要讓原本發紙片的機台改裝去發手機面板,幾乎是不可能的事情,有太多的零組件需要修改,這麼改完已經是完全不同的東西了。
由於設計一部完整的機械需要規畫模擬、零件選料、工程繪圖、裝配、試車,耗費大量的研發人力及資源,因此,設計機械的廠商一般只會研發後續訂購數量較大的設備。
當您的工廠想要各式各樣的自動化機具,但剛好市面上的量產型設備沒有適合的選擇,後續採用數量又沒辦法抓得很多,很難找到設計廠商幫您作客製化。
因此,這種類型的應用反而是機器手臂適合的場景,當系統承包商遇到工廠內各種小量多樣化的工作自動化流程需求時,也會比較傾向採用機器手臂來進行系統設計。
使用機器手臂
這裡有兩個短片,第一個是機器手臂將整疊的紙箱取到封箱機上進行折紙封箱的動作。
第二個是機器手臂將手機面板從 Tray 盤中取出放到流水線上的動作。
這也是一個【上下料搬運】的行為,採用機器手臂會有以下優缺點:
【優點】彈性高。只要多花一點心思在評估目標任務的特性是否符合機械手臂自身的設計規格 (例如最大荷重等等),以及設計適合的工具裝上去,稍作整合就可以做不同的事,不需要花很多時間在研發整部機器。直接購買常見的機器手臂款式即可。
【缺點】在極度簡單的動作任務中,例如單純的直線運動,一顆氣壓缸或直線馬達就可以輕易做到,使用機器手臂的成本過高。在特別要求定位精度及穩定度的場合,例如精密床台,通常還是專門設計的機械的市場。
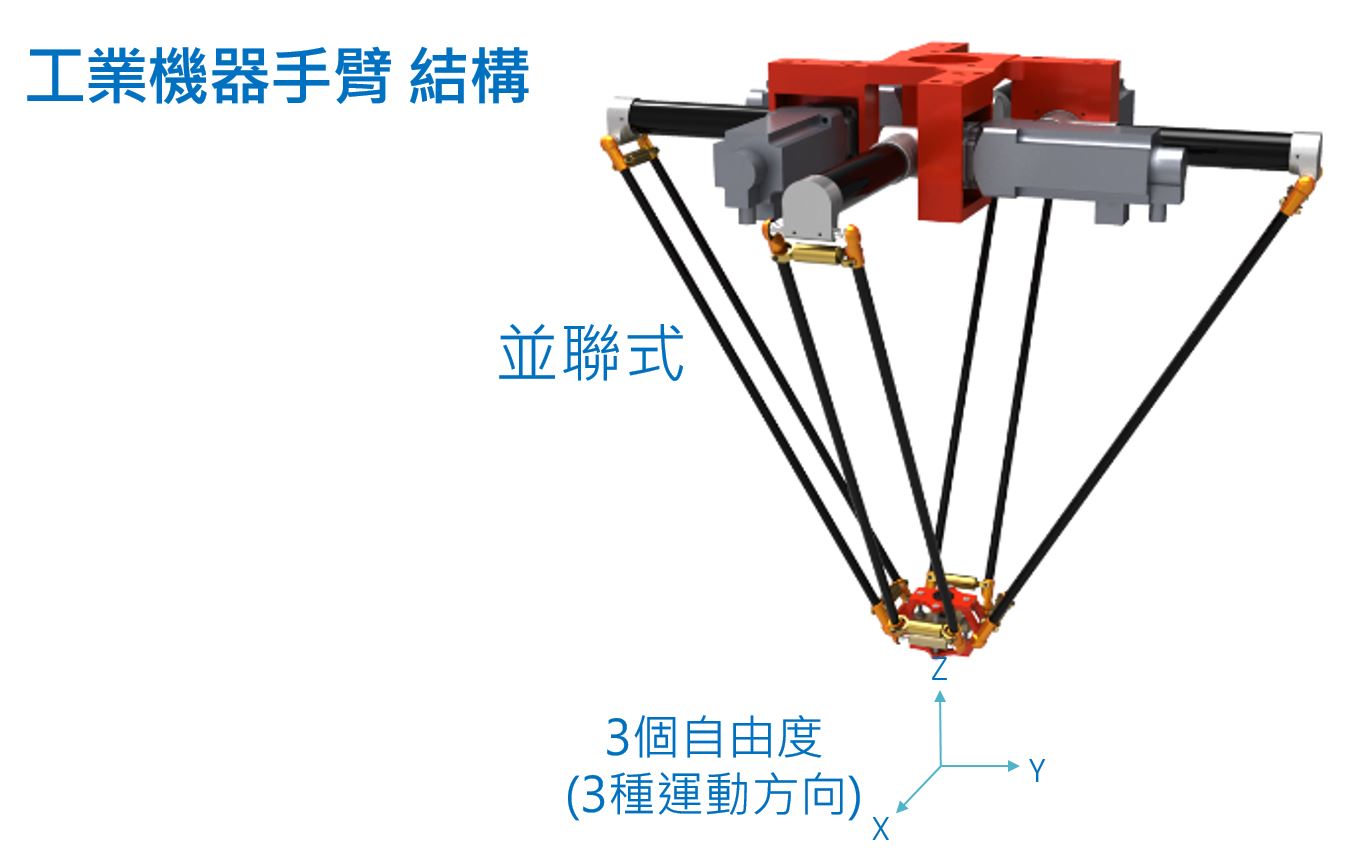
機器手臂的結構
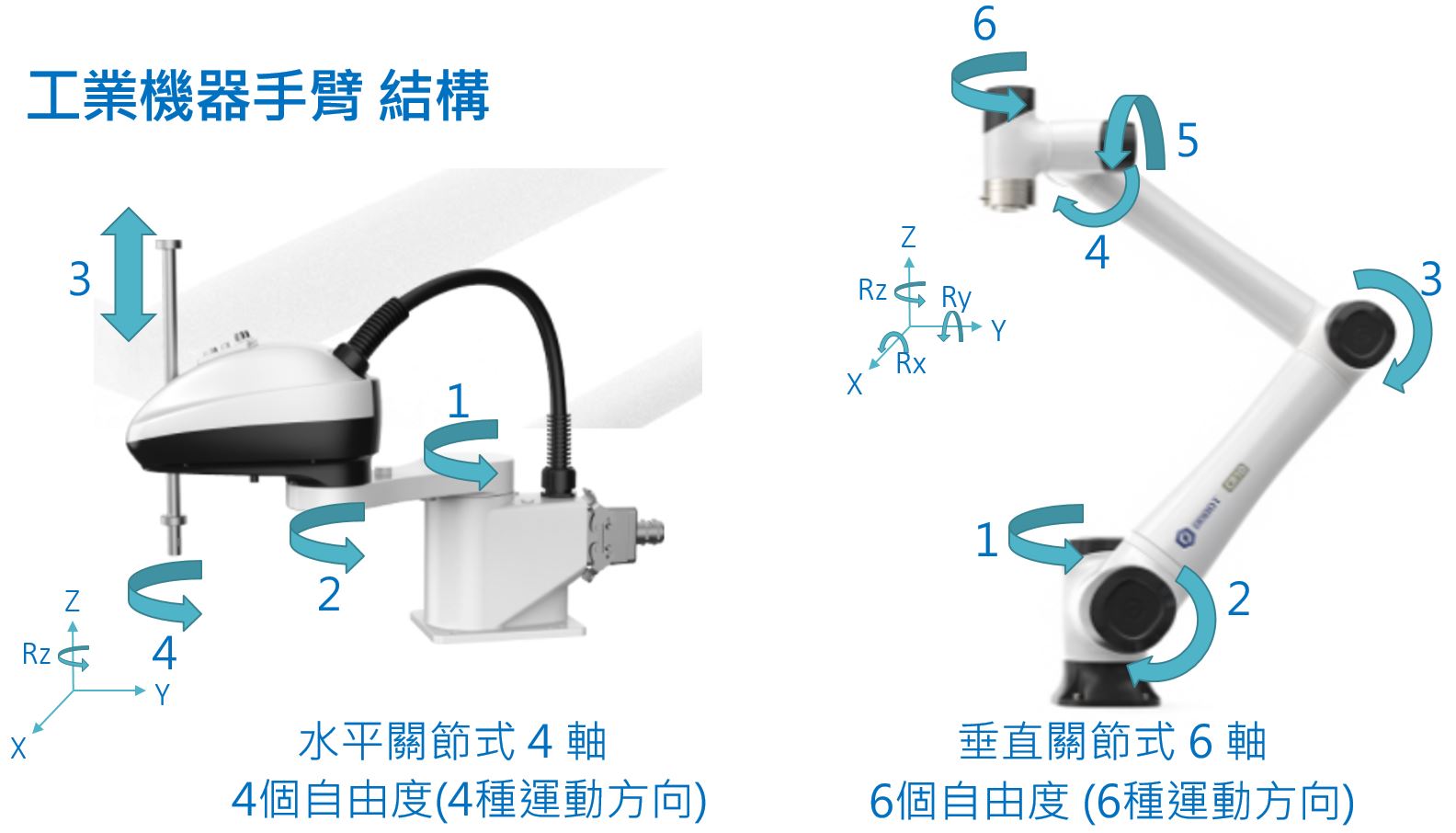
這兩種機器手臂的結構形式是目前市面上最常見的,分別為。
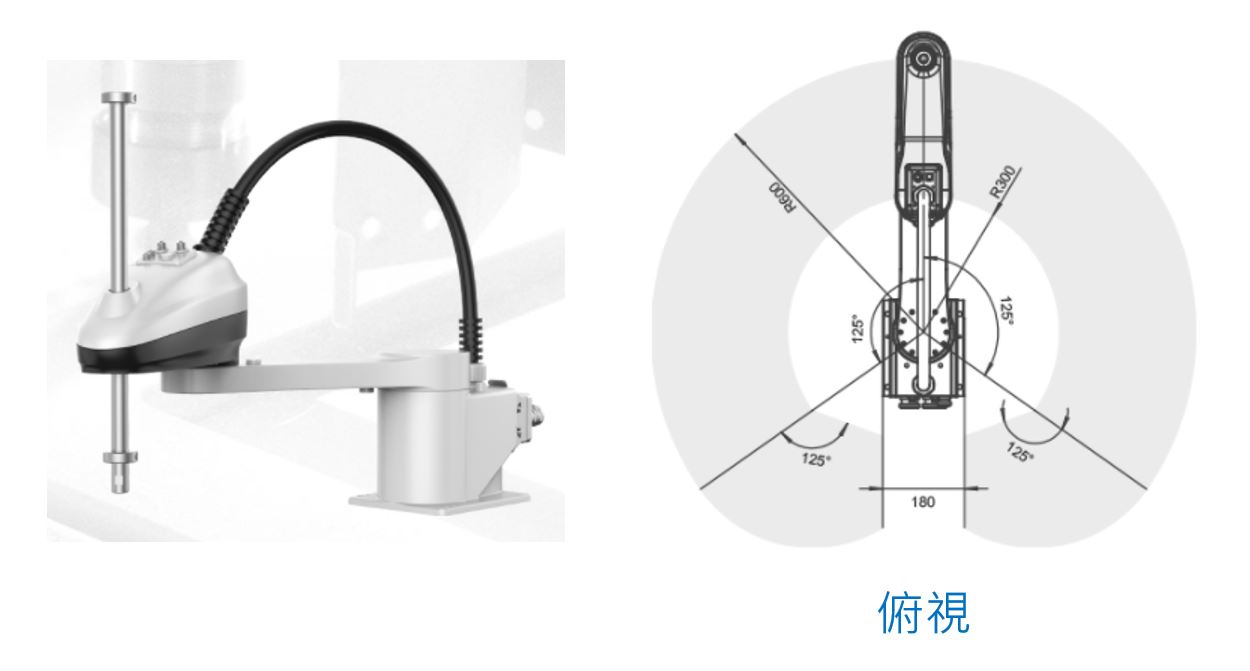
- 水平關節式 4 軸: 通常簡稱 SCARA (Selective Compliance Assembly Robot Arm) 手臂,它有三個水平旋轉最後串聯一個垂直升降的運動軸,它的法蘭面可以做 XYZ 方向的平移運動及 Rz 方向的旋轉運動,總共有 4 個自由度。
- 垂直關節式 6 軸: 簡稱六軸機器人,它具有六個旋轉軸一個一個串聯,可以做 XYZ 方向的平移運動及 Rx、Ry、Rz 的旋轉運動,總共有 6 個自由度,彈性相當的高。
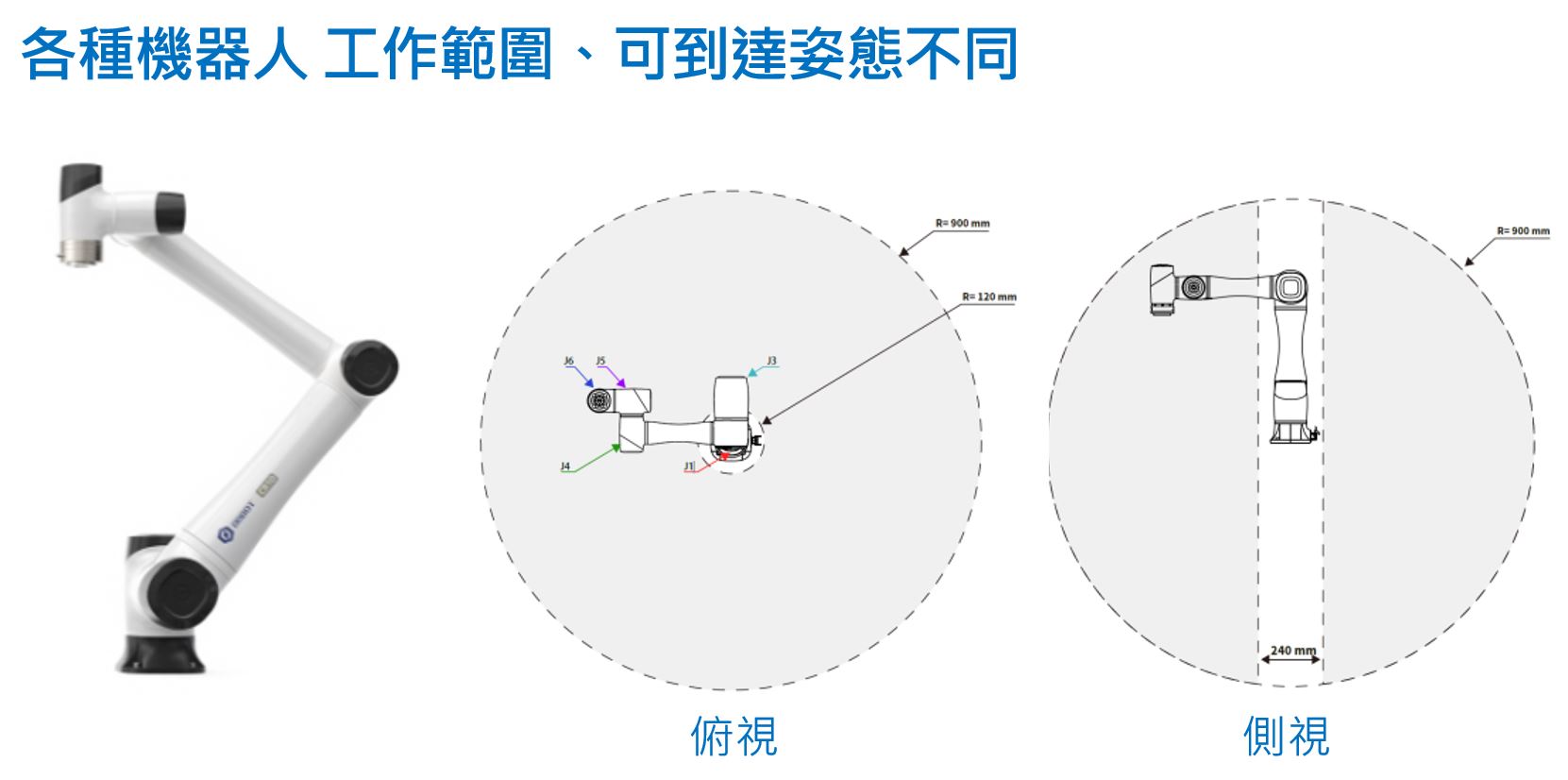
各種型態、尺寸的機器手臂,因為結構設計的關係,它的法蘭面可到達的工作範圍均有所不同,甚至不同廠牌類似的款式間都會有所差異。這是在選用機器手臂之前需要事先知道的,機器手臂廠商必定會提供各型號的工作範圍圖供參考,在導入實際應用前做好妥善規劃,挑選適合的機器手臂。
開始用機器人的兩三事
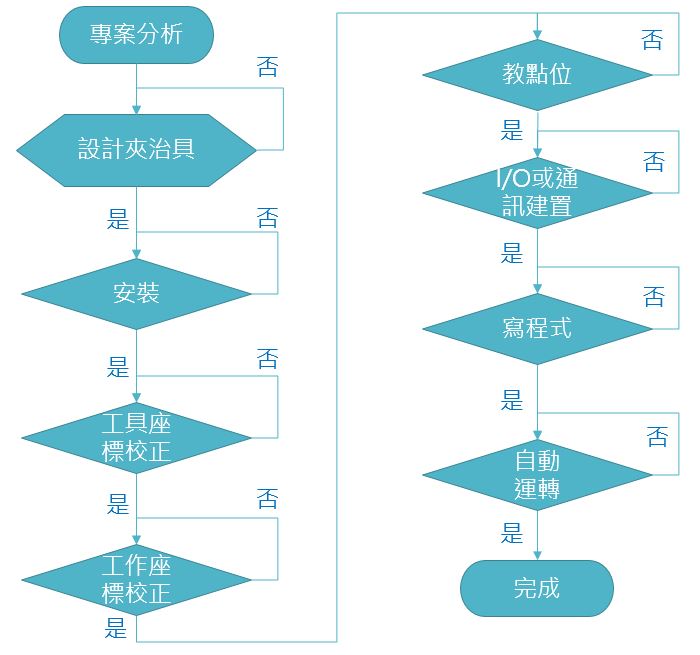

前面我們提到的都是機器手臂規格相關的知識,但是,一家工廠、一個專案小組或是一個工程師,在將工業機器手臂導入到機器設備上,或是導入到生產線進行工作之前,除了挑選適合的機器手臂規格之外,最重要的第一件事其實是分析專案需求,到底想讓機器手臂抓什麼東西,找尋或是設計相對應的夾具或治具。
我們已經提過,使用機器手臂的優點在於【只要設計好適合的工具裝上去,稍作整合就可以做不同的事,不需要花很多時間在研發整部機器】,正所謂【工欲善其事,必先利其器】,你需要了解要讓機器手臂抓的物件有什麼特性,幫它裝上適合的夾爪、吸盤或是其他的加工用器具,例如電動起子、電弧焊槍,若這些工具機本身並不相容於機器手臂,要如何轉接到機器手臂上去 ? 很多的面向需要考量。
若您的工廠只是想導入機器手臂到生產線,但並沒有專業的機構設計工程師進行這樣的工作,光買進一部會動的機器手臂是不夠的。坊間有許多協助設計將機器手臂導入應用的系統整合商在進行這樣的服務。
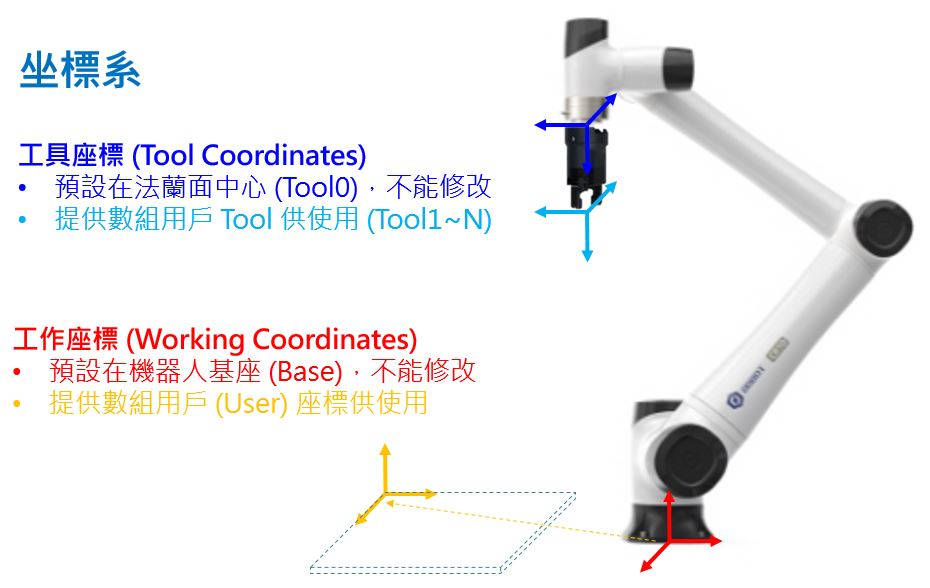
當將機器手臂安裝到工作檯面,以及將工具頭或夾爪裝到機器手臂法蘭面以後,下一個步驟就是進行機器手臂的座標校正。機器手臂會提供數組額外的座標系統供用戶使用。
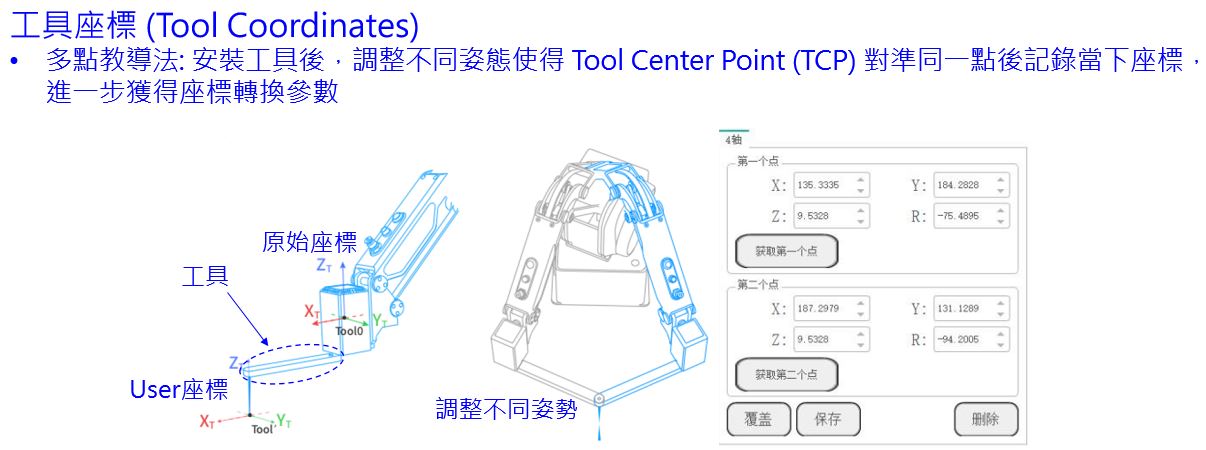
- 工具座標: 即 Tool Coordintates,它的預設值在機器手臂的法蘭面中心,出廠前已經校正好,是不提供用戶修改的。由於使用者一定會裝上各式各樣的工具頭,在某些情況會需要進行工具座標校正,將工具座標設定到工具頭的前端,這樣在後續編輯點位的時候會以用戶所定義的工具座標為基準,若不這麼做,在座標顯示的時候會以預設的法蘭面為基準,比較不直觀。若有定義工具座標的需要時,一安裝夾具或重新安裝夾具,就要馬上做,如下圖。
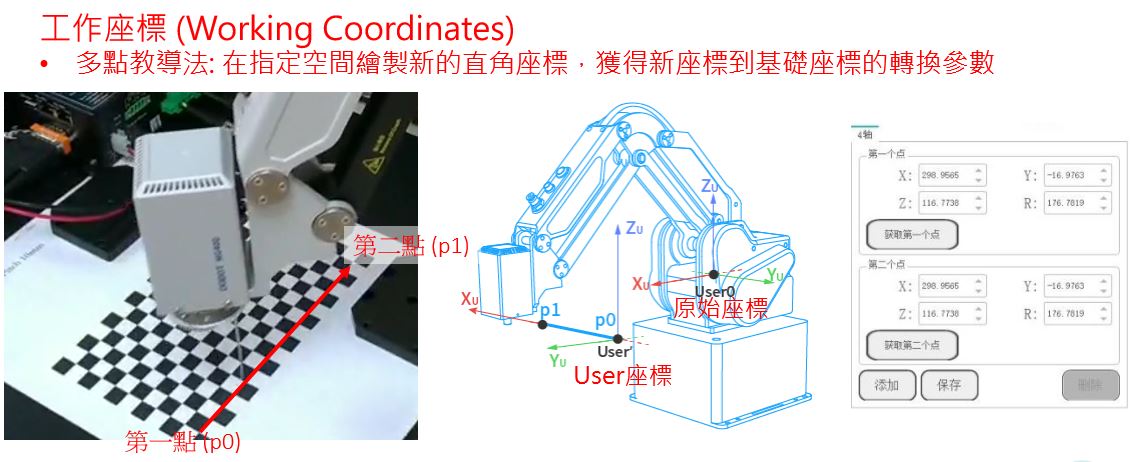
- 工作座標: 即 Working Coordinates,指的是下達機器手臂運動命令的時候,點座標是以哪裡為基準。預設值在機器手臂的底座中心,即基座座標 (Robot Base Coordinates),出廠前已經校正好,是不提供用戶修改的。由於使用環境可能會有不同的工位,在某些情況會需要進行工作座標校正,將工作座標設定沿著工位的相對方向,這樣在後續編輯點位的時候會以用戶所定義的工作座標為基準,若不這麼做,在座標顯示的時候會以基座座標為基準,比較不直觀。當工位改變時,只要馬上利用工位上本身的特徵 (例如 Pin 孔或是邊線) 或將事先設計好的校正板裝在工位相對位置上進行工作座標校正,如下圖。

當座標校正完成後,在機器手臂點位清單上賦予幾個容易觀察的座標點,相對位置參考校正好的新座標軸,觀察是否沿著正確的位置走 (如右方影片)。
點位教導
這邊要提到一個基本觀念,機器手臂是機械,不是智慧生命,它的點位、運動軌跡不是無中生有的,必須得靠人工去一點一點教導並儲存下來。

用教導器將點位記錄下來
這是最基本的標準配件之一,使用專用的教導器可以在手動模式操控機器人移動,到達想要記錄的位置時按下教導器上的儲存按鈕,可以將該位置記錄下來。
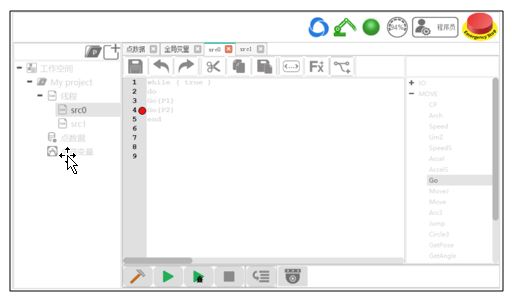
用腳本軟體將點位記錄下來
與用教導器的方式雷同,也是最基本的教導方式之一及標準配件。機器手臂會配置一套專用的腳本開發軟體,讓開發者使用電腦來連線機器手臂,操作機器手臂、記錄點位,並撰寫機器手臂的程式,它內含的功能比教導器更完整、更複雜,但必須準備一台電腦並下安裝該軟體才能使用。
協作型機器人可用拖曳教導
一般工業型機器手臂無法這麼做,這是協作型工業機器手臂專屬的特色,它利用力回饋技術,進入【拖曳模式】後,可感知目前的力道,讓使用者拖著它動,代替用教導器或腳本軟體操作機器手臂的部分工作,減少教導點位的時間。
【進階應用】整合視覺定位
這是唯一不需要人工教導點位的作法,但是整合起來相當複雜,所以屬於進階應用,並不一定是標準配件。
由於機器手臂與視覺系統本身屬於兩類獨立的產業且品牌眾多,好在機器手臂腳本程式提供了例如 TCP/IP Socket 或 Modbus 等通訊傳輸媒介,讓同時熟悉視覺及手臂的系統整合開發商可以將視覺定位的座標撰寫程式碼傳給機器手臂,讓它能更智慧一點。
因為跨品牌間、不同應用專案的資料傳輸都是客製化的,每一件個案都需要重新撰寫程式碼,複雜度高。故有部分手臂品牌與視覺品牌合作,尤其是協作型機器人的廠商非常積極的在布局這塊,開發出標準視覺模組,以及圖控式的開發模式,做到了隨插即用,減少程式開發時間,慢慢的實現了手臂長眼睛的願景。
程式開發
沒錯,機器手臂是機械,不是智慧生命,程式動作不是無中生有的,必須得靠人工去一行一行撰寫並儲存下來。
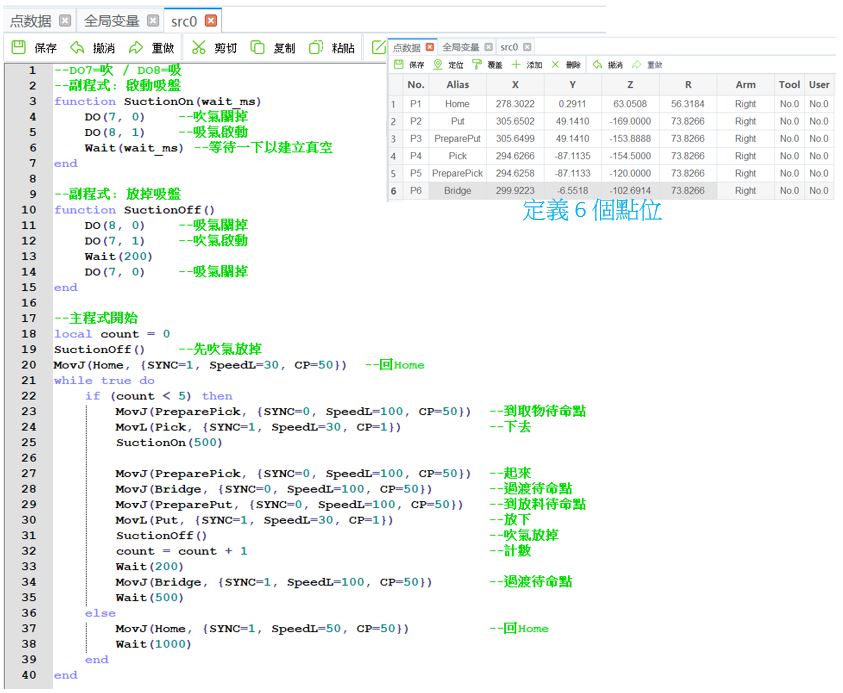
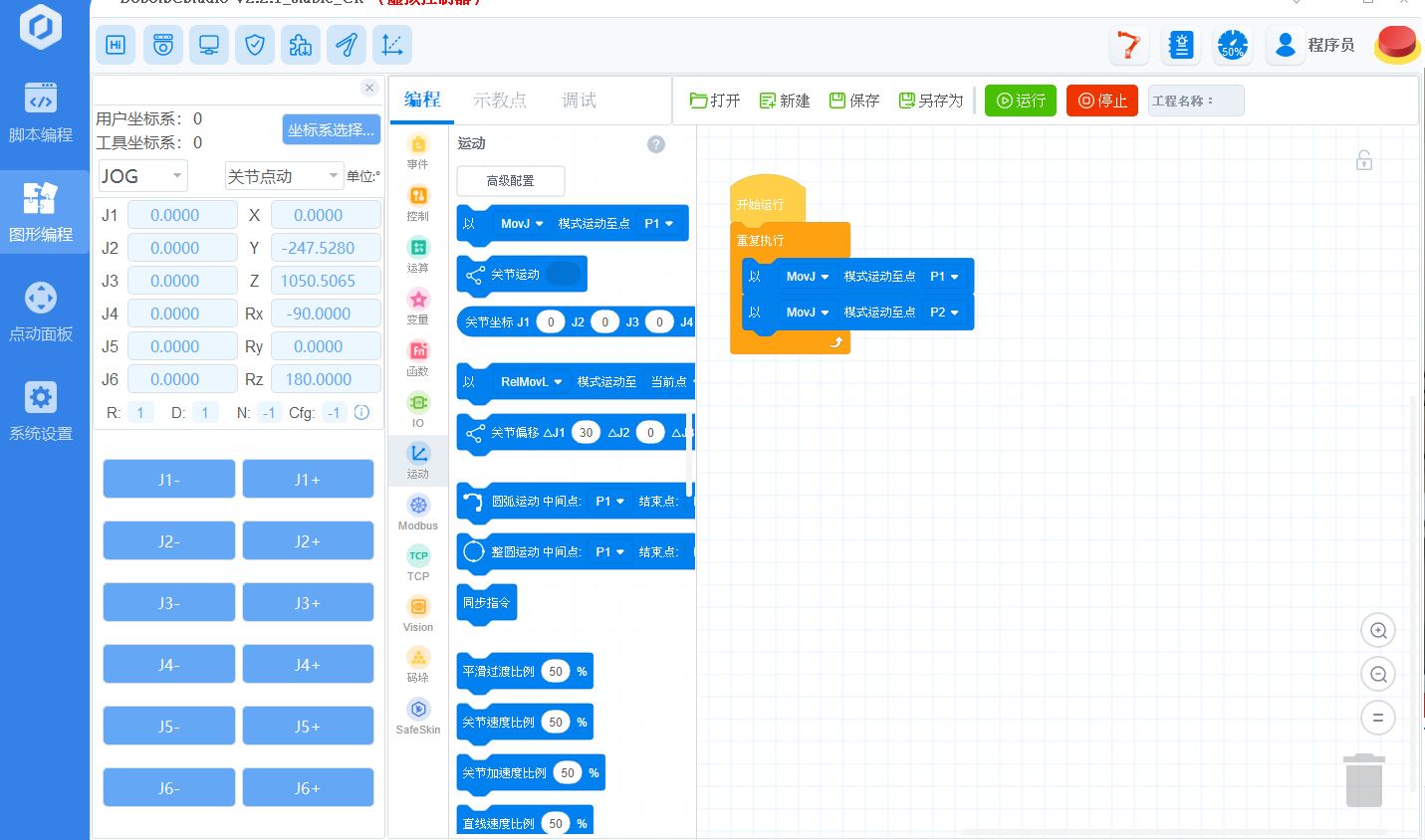
機器手臂會提供腳本語法,供開發者用教導器或專用腳本軟體撰寫程式。腳本語法含有點對點運動、直線運動、弧線運動、圓周運動、IO 控制、通訊控制、If-Else、Loop 迴圈、變數等等,讓你去設計機器人的動作,一個簡單的取放程式 (Pick-and-Place) 如果都是固定點位取起、固定點位放下,只要教點有教好,剩下的程式碼沒幾行,其實不用花很多時間就可以寫出來,有些機器手臂廠牌甚至提供圖控式的腳本開發,只要透過拖拉腳本動作方塊,寫起來更簡單快速。
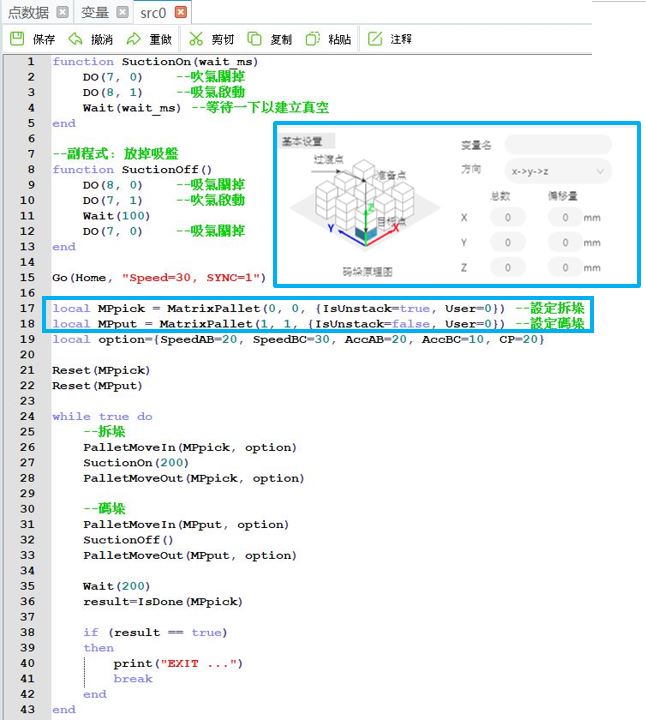
稍微複雜一點,例如拆垛 (將整疊的同型物料一個一個拿出來) 碼垛 (將同型物料一件一件按規則疊好),由於需要判斷物件的長寬高以及記錄堆疊次數,程式寫起來複雜度增加。由於這類程式在倉儲及物流應用廣泛,機器手臂廠商看到了商機,故將這些拆垛碼垛的程式碼包裝得比較簡潔,開發者只要設定單一物件長寬高、個數、進入點、離開點等等,就可以在腳本程式中引用,減少腳本程式開發時間。
更複雜一點,例如輸送帶跟隨 (Conveyor Tracking),由於物流在流水線上有時間限制不能暫停或中斷,機器手臂必須移動中取放物件。由於需要一直向外部輸送帶裝置收取物件位置資訊、修正物件在機器手臂的座標,不僅程式寫起來複雜度大幅度增加,單純用腳本語法去實現這個功能吃力不討好。同樣的,由於這類應用也相當廣泛,機器手臂廠商支援整合輸送帶編碼器 (Encoder),實現用硬體或韌體來跟隨將物件位置,功能直接包裝成模組,開發者只要設定編碼器、起始 Sensor 等等,就可以在腳本程式中引用,減少腳本程式開發時間。

程式開發完成,在腳本軟體中按下【運行】按鈕,測試你的程式 !
腳本程式雖然開發的時候是在電腦上瀏覽,但真正實際執行的時候是機器手臂的控制器在執行,所以,當按下運行按鈕的當下,無論程式原本在哪個位置,都必然要傳到控制器上執行。
利用腳本軟體測試機器手臂程式,可以立即看到執行狀態,方便除錯。
程式開發完成,讓它動起來吧 !
雖然教導器或腳本軟體可以很方便的執行指定的手臂程式,但機器手臂最終是要在生產線上工作的,不可能永遠都需要保母 (寫程式的工程師操作腳本軟體) 來喚醒它工作。所以,上傳到機器手臂控制器上的腳本程式必須要能夠【自動執行】,或是【聽到一個訊號以後自動執行】。
機器手臂廠商會提供利用 I/O 或通訊界面 (如 Modbus) 的方式來實現這個功能,當手臂腳本已經準備好、要執行哪支腳本也都設定好、機台的線路都已經接好,只要對應的 I/O 接點一起動,手臂馬上就會動起來;只要對應的 I/O 接點一停止,手臂馬上停止手邊工作。

本篇大致上先介紹到這裡,希望您對工業機器手臂有初步的認知及了解。