
名詞解釋
Strobe Light 中文翻譯作頻閃燈,其中 "閃燈" 是指燈光只開啟很短的時間的意思,而 "頻" 這個字,指的是基於某種控制節奏,按照特定頻率地去觸發這個閃光。
Strobe Light Control 即閃頻控制,代表一種控制技術,你能用很短的脈波時間、具有規則的頻率去控制閃光燈。
我們先來看看簡單的閃頻控制示範
我們稍微說明一下這個 Demo 在做什麼
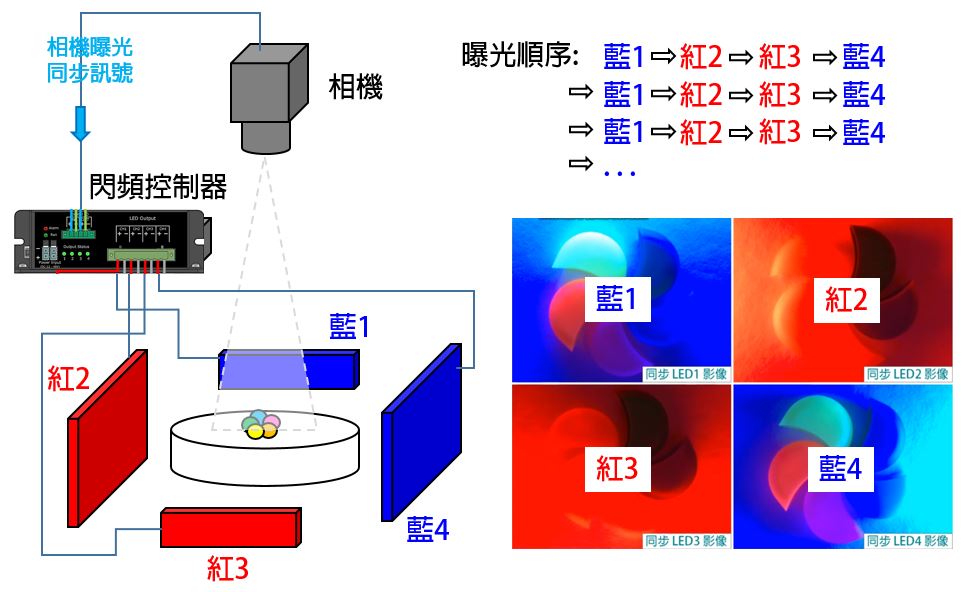
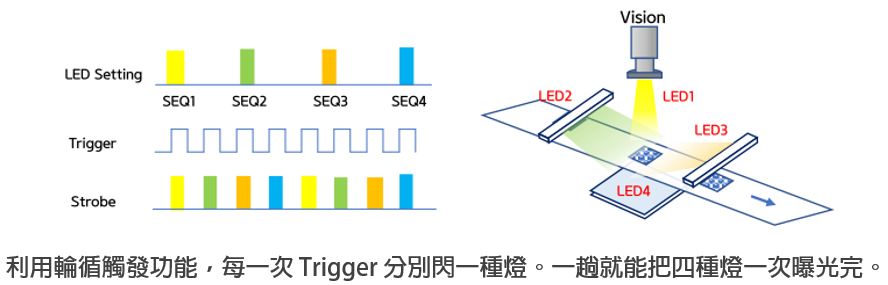
- 首先,相機曝光的時候,會同步送訊號給閃頻控制器,閃頻控制器收到訊號的時候,會觸發閃燈開啟
- 閃頻控制器上銜接著四顆燈,我們個別給它代號,叫做藍1、紅2、紅3、藍4,這四顆燈分別位於被拍攝物體的四周
- 相機曝光第一次的時候藍 1 會跟著閃,相機曝光第二次的時候紅 2 會跟著閃,相機曝光第三次的時候紅 3 會跟著閃,相機曝光第四次的時候藍 4 會跟著閃。只要相機持續一張一張的曝光下去,光源也會忠實地按照藍 1、紅 2、紅 3 、藍 4、藍 1、紅 2、紅 3 、藍 4、藍 1、紅 2、紅 3 、藍 4、. . . 的順序不停地輪流切換
- 隨著相機的拍攝速度 (FPS,frames per second) 的增加,從 2 fps、10 fps,一直增加到 300 fps,即使速度這麼快、切換的時間這麼短,相機的第一張 frame 永遠對準著藍 1、相機的第二張 frame 永遠對準著紅 2、相機的第三張 frame 永遠對準著紅 3 、相機的第四張 frame 永遠對準著藍 4,從來不會有任何一張脫隊或是錯亂,表示同步控制非常的精準
原理說明
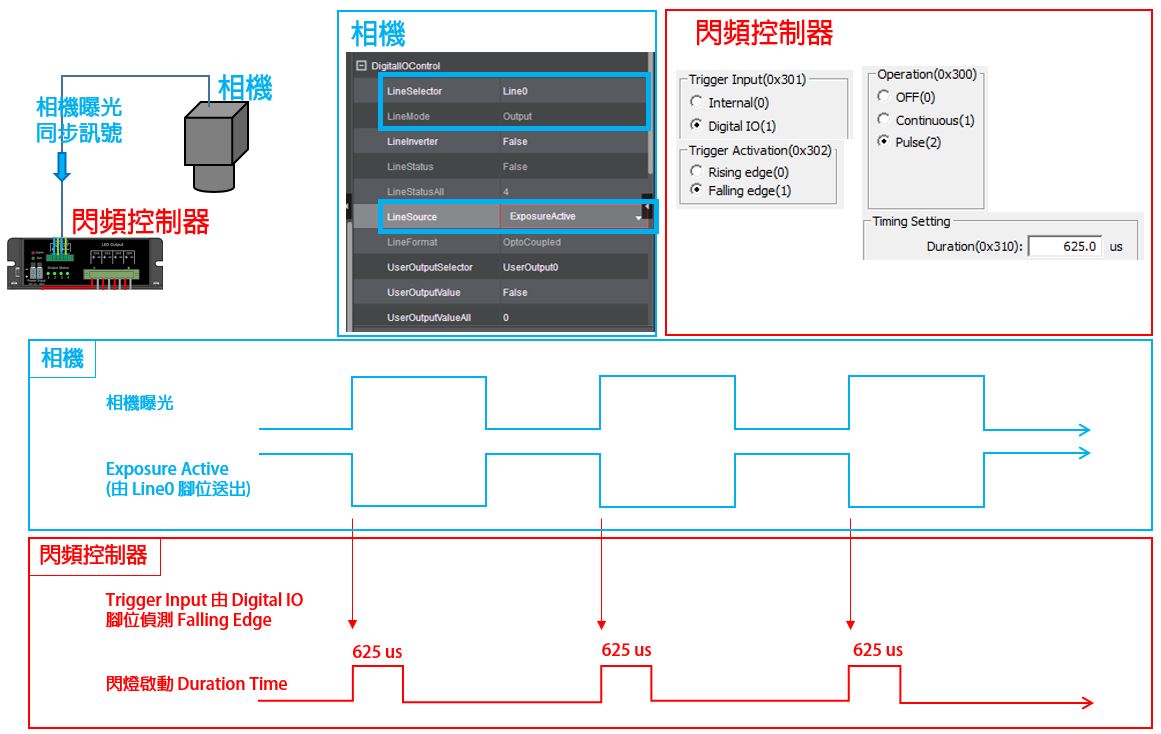
【相機曝光的時候,會同步送訊號給閃頻控制器,閃頻控制器收到訊號的時候,會觸發閃燈開啟】這件事,我們用這個簡圖來說明。
- 首先看到相機的設定畫面,當你將 Line Selector 設定為 Line0,將 LineSource 設定為 ExposureActive 的時候,這意味著, 我們看到淺藍色的時序圖,當相機曝光的時候,會同步產生 ExposureActive 波形訊號,並且由 Line0 這個腳位送出。
- 注意一點,此相機廠牌 ExposureActive 訊號正在曝光的時候是低電位、沒曝光的時候為高電位,但不同廠牌的 ExposureActive 訊號相位未必相同
- 再來看到閃頻控制器的設定畫面,將 Trigger Input 設為 Digital IO,Trigger Activation 設為 Falling Edge,工作模式設為 Pulse mode,Timing Setting 的 Duration 設為 625 us。這意味著,當相機的 Line0 腳位銜接到閃頻控制器的 Digital IO 腳位後,相機每曝光一次,閃頻控制器的閃燈脈波就會跟著啟動一次 (抓 ExposureActive 訊號波形的下降時機點),每次啟動 625 us。
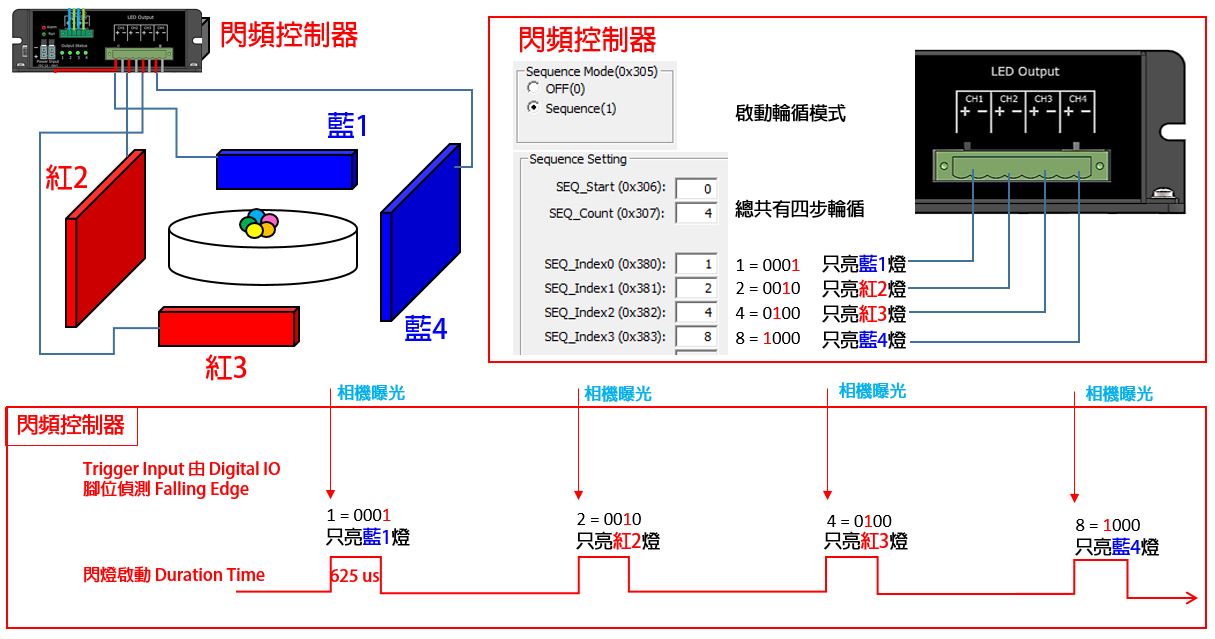
- 首先,我們已經知道當相機曝光的時候,閃頻控制器會跟著被觸發。
- 為了讓觸發的時候可以切換不同的燈,閃頻控制器必須要有【輪循模式】這個功能,所以,我們將 Sequence Mode 這個選項開啟,這樣才能在不同的 channel 間進行切換。
- 設定輪循總數為 4 個步序,設定每次輪循要開啟的 channel,如上圖右上,我們用代表 channel 的 bit 表示哪一通道要開啟,讓它分別對應到藍 1、紅 2、紅 3 、藍 4 四盞燈。
- 按照這樣設定,就可以讓相機曝光的時候按照藍 1、紅 2、紅 3 、藍 4 的順序來閃燈了。
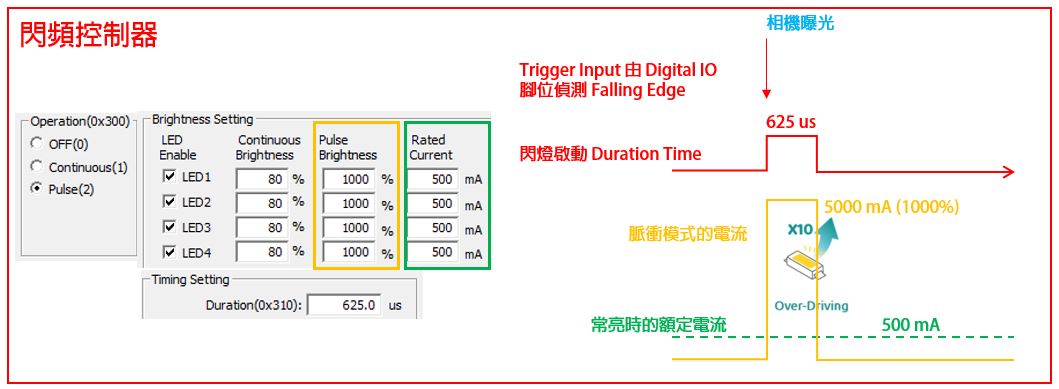
- 首先,我們要了解 LED 燈的亮度是靠電流大小決定的,電流愈大、亮度愈高。
- 通常訂製的 LED 燈組會有個額定電流 (Rated Current) 值,即這顆燈組如果要長時間開啟,必須在此額定電流以下工作,超過額定電流的話溫度會大幅增加導致燒毀。
- 給定燈組 100% 的額定電流,表示想讓這顆燈要在【正常情況】滿載工作,若超過 100% 的額定電流,則視為電流超頻 (Over-Driving),需要縮短工作時間否則容易燒毀。
- 而縮短工作時間唯一的方法就是使用脈衝模式 (Pulse),讓點燈的時間很短。
- 所以,短時間脈衝 (Pulse) + 電流超頻 (Over-Driving) 兩相配合之下,可以讓 LED 在很短的時間輸出很大的亮度。
閃頻控制器選型

因為需要高拍攝速度、短曝光時間、短閃燈時間,所以,以下是幾個你挑選閃頻控制器的理由
- 速度: 閃頻控制器被相機同步訊號觸發後能用多短的反應時間做出響應,並能產生多短的脈衝輸出,會是您注意的規格。
- 亮度: 閃頻控制器能支援多大的電流輸出,有沒有 Over-Driving 功能,是很重要的。
- 頻道: 因為可能用到不只一個燈組,所以閃頻控制器是否支援多頻道,多頻道是否能自由設定輪循觸發,是加分的。
閃頻控制器應用1: 高速移動飛拍,凍結影像,維持好的曝光亮度
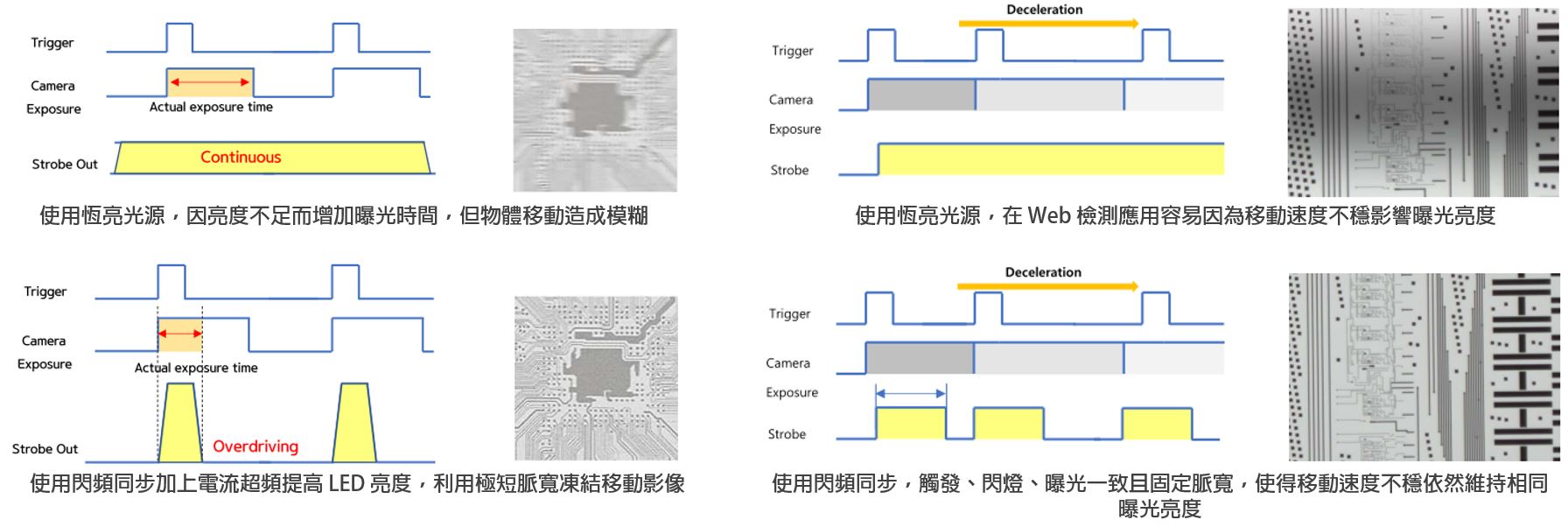
第一,在自動化光學檢測產業,設備與經濟效益息息相關,愈高的產能要求愈快的檢測速度。由於跟時間在賽跑,常常需要用飛拍的方法,即物體一邊移動一拍拍照一邊進行檢測。如果您用恆亮的 LED 來曝光,容易因為燈光亮度不夠,只好延長相機曝光時間來補足,但延長曝光時間卻限制了被檢測物體的最大移動速度,一旦物體移動速度過快會帶來模糊的影像。所以,使用閃頻控制器的短時脈衝 + Over-Driving 就能壓榨光源的輸出亮度,即可突破原本的移動速度限制。
第二,在 Web 檢測 (針對連續料捲拉出來的材料的檢測) 應用中,因為捲動速度很快 (通常是用每秒多少公尺在算的),相機的曝光時間被壓縮到很短,故會用到 TDI 線掃描相機來大幅提昇感光度,但會有以下的副作用:
- 因 TDI 特有的設計結構的關係,TDI 相機的曝光時間永遠會自動以 line 跟 line 的間隔的最長間隔來定義,不能強制指定曝光時間
- 因為線掃描的間隔時間是用料捲滾筒上的編碼器決定的,又因為料捲的長度會變化,張力很難控制到完全一致,導致滾筒的轉速會變,連帶使得線掃描的拍攝間隔會變
- 承上,如果用的又是 TDI 線掃描,因為拍攝時間一直變,導致曝光時間就跟著一直變
- 再承上,如果您用的是恆亮的 LED 來打光,因為曝光時間一直飄來飄去,導致影像的亮度也一直飄來飄去很不穩定
所以,在 Web 連續檢測的應用中,TDI 相機會再搭配閃頻控制器用固定脈寬的燈光脈衝來穩定控制影像亮度。
閃頻控制器應用2: 掃描一次就想獲得多種光源的影像
瑕疵檢測的應用中,常會遇到不同種類的瑕疵需要用不同種類的光源才能打出來的情形。但是為了滿足多種光源的需求,在機台設計的時候會遇到以下幾種困境或挑戰。
- 若被檢測物體是在連續的輸送帶上進行檢測,因為輸送帶是單向輸送的,將物體流過去後無法再倒退,拍照取像只有一次機會,故很難整合不同打光的設計。所以只好設計多個站點,一個站點一台相機,搭配一種光源,多拍幾次來達成想拍攝各種光源的目的,但這樣又增加了輸送帶的長度,導致機台體積變大。長度很長的機台意味著要佔用比較大的廠房空間,單位土地的產出就會下降,對於購買機台來使用的企業主而言,龐大的機台設備是相對不討喜的,這種機台的賣相就差。
- 為了解決上述難點,只好放棄在主線輸送帶檢測的想法,故只好額外設計移載機構或機器手臂等等額外的裝置,將待測物夾取出來,去屈就不同的相機、光源拍照站點,但額外的機構或機器手臂裝置也大幅稱加了機台成本,而且多餘的移載移動,讓機台的節拍時間上升,單位時間的產出就會下降。
如果用的是 Line Scan 線掃描相機,由於線掃描相機與待測物必須要相對移動才能掃描完一整張影像,所以它只能在移動平台或是輸送帶等移動裝置上架設,因此,上述的設計難點依然會出現。
- 一台線掃描相機 + 正上方外同軸線型燈 + 前30度線型燈 + 後30度線型燈 + 正下方背光線型燈,如果所有燈都開啟,掃描完每一種燈的曝光都會混在同一張影像裡無法區分。
- 有辦法掃一次,分別獲得四張不同光源的影像嗎?
- 設計不同站點、不同相機、不同光源分開曝光不是唯一方法
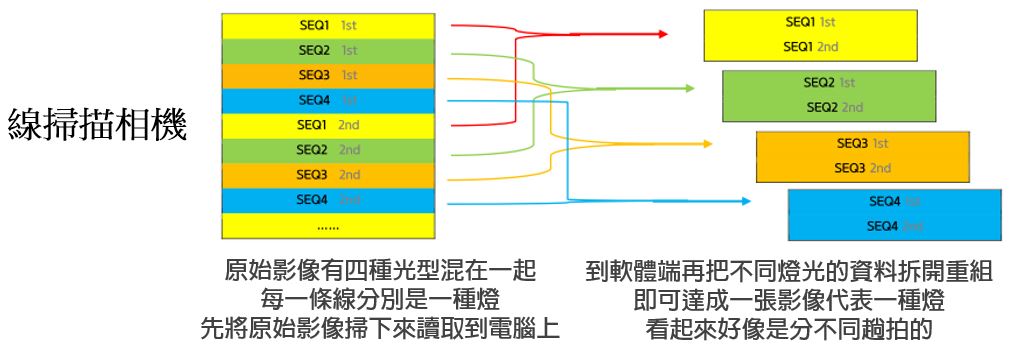
此時一樣可以利用短脈衝+輪循觸發功能,雖然原始影像還是混在一起拍的,但微觀來看,每一條線都分別依序來自不同的光源;接下來就可以靠軟體後製,將來自於不同光線的資料分別拆開,重組回區分不同光源的影像。
例如有四種燈,則第一次觸發會是一號燈,一號燈拍的影像在第一條線,第二次觸發會是二號燈,二號燈拍的影像會在第二條線,依此類推;重組的時候,將第 1, 5, 9, … 條線取出來可以組成第一種影像,將第 2, 6, 10, … 條線取出來可以組成第二種影像,依此類推。
閃頻控制器應用3: Photometric
簡單來說,Photometric 方法是一種打四個方向 (至少四個方向) 的光源,並分別針對四個不同方向的光源取得四張影像後,利用演算法來估計物體表面 Curvature (曲率,我們認為表面有劇烈起伏的地方有較大的曲率),甚至重建 3D 表面凹凸起伏的一種演算法。
在瑕疵檢測或特徵循邊定位的案例中,想要檢出物體表面的刮痕,或是定位物體表面的高低斷差,因為打外同軸、環形燈等等效果都不盡理想,最後您會選擇用條燈來打單方向的側光,以凸顯刮痕或是斷差的特徵。這個挑戰在於,單方向的側光對於特徵的走向非常敏感,方向不對就打不出來了,很可惜您無法預料刮痕會是什麼走向。於是只好四個不同方向的條燈一起開,但一起開燈就變成環形光了,效果沒有只開一盞來得好;四個方向輪流開燈,慢慢切換,速度又很慢,沒有效率。
這時候,利用短脈衝+輪循觸發功能,就能在極短的瞬間將多種燈光一次拍完,加上 Phtometric 演算法,就可以將刮痕、斷差、孔洞、凸點等等高低起伏的特徵凸顯出來。