
一,開箱
.jpg)
機器手臂總共分為兩箱包裝,第一箱是機器手臂本體,內有簡易說明文件、定位孔圖紙、末端IO線。
.jpg)
第二箱是控制器,包含重載線、電源線、IO端子等等。

機器手臂本體與控制器序號後8碼是一對一匹配的,尤其是進貨倉儲混著擺放的時候,在開箱當下需要注意。
雖然同型號但不同序號的控制器也可以連上同型號但不同序號的手臂並能開機使用,但由於手臂在出廠前事先有做過絕對精度校正,手臂的校正資訊儲存在跟它匹配的序號的控制器裡面,因此使用相同序號的手臂與控制器才能發揮最完整的效能。
二,資料下載

點擊DOBOT官網 https://www.dobot.cn/ 以後,進入【服務支持】【下載中心】可以找到所需資源的下載連結,下載前需用公司email註冊一組免費帳號,填一填資料即可。
因為DOBOT的產品很多,左邊側邊欄有產品篩選選項,例如篩選CRA,可以只顯示跟CRA有關的資料。下載資料建議挑選最新的版本,以獲取最即時的更新消息。

第一個一定要下載的是使用手冊,主要是介紹硬體相關教學、尺寸及性能規格等等。
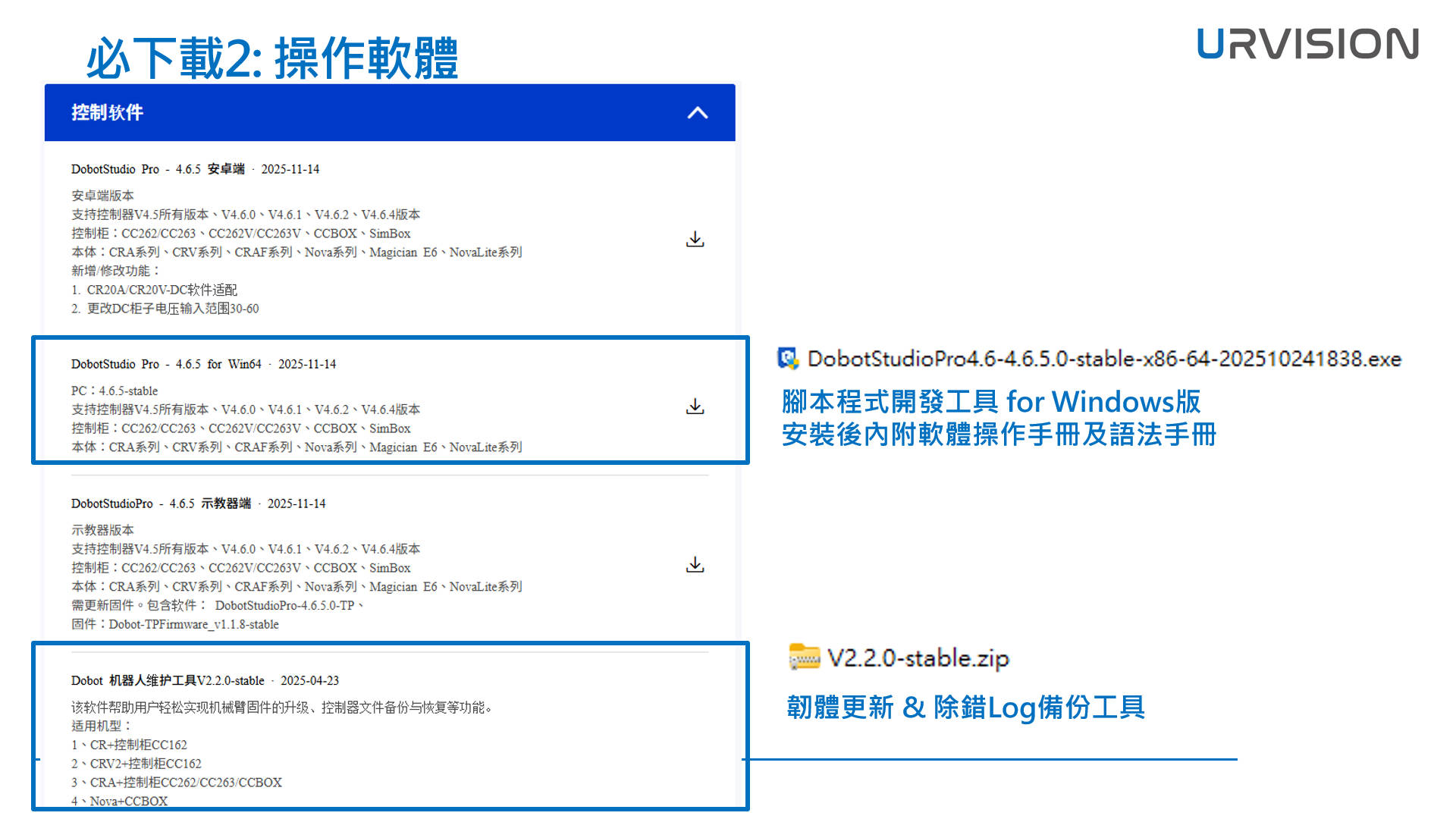
第二個必要下載的是Windows版的開發軟體 - DOBOT Studio Pro,用來操作機器手臂及寫程式使用;另一個是除錯備份小工具,當有韌體更新或故障問題需要查的時候使用。
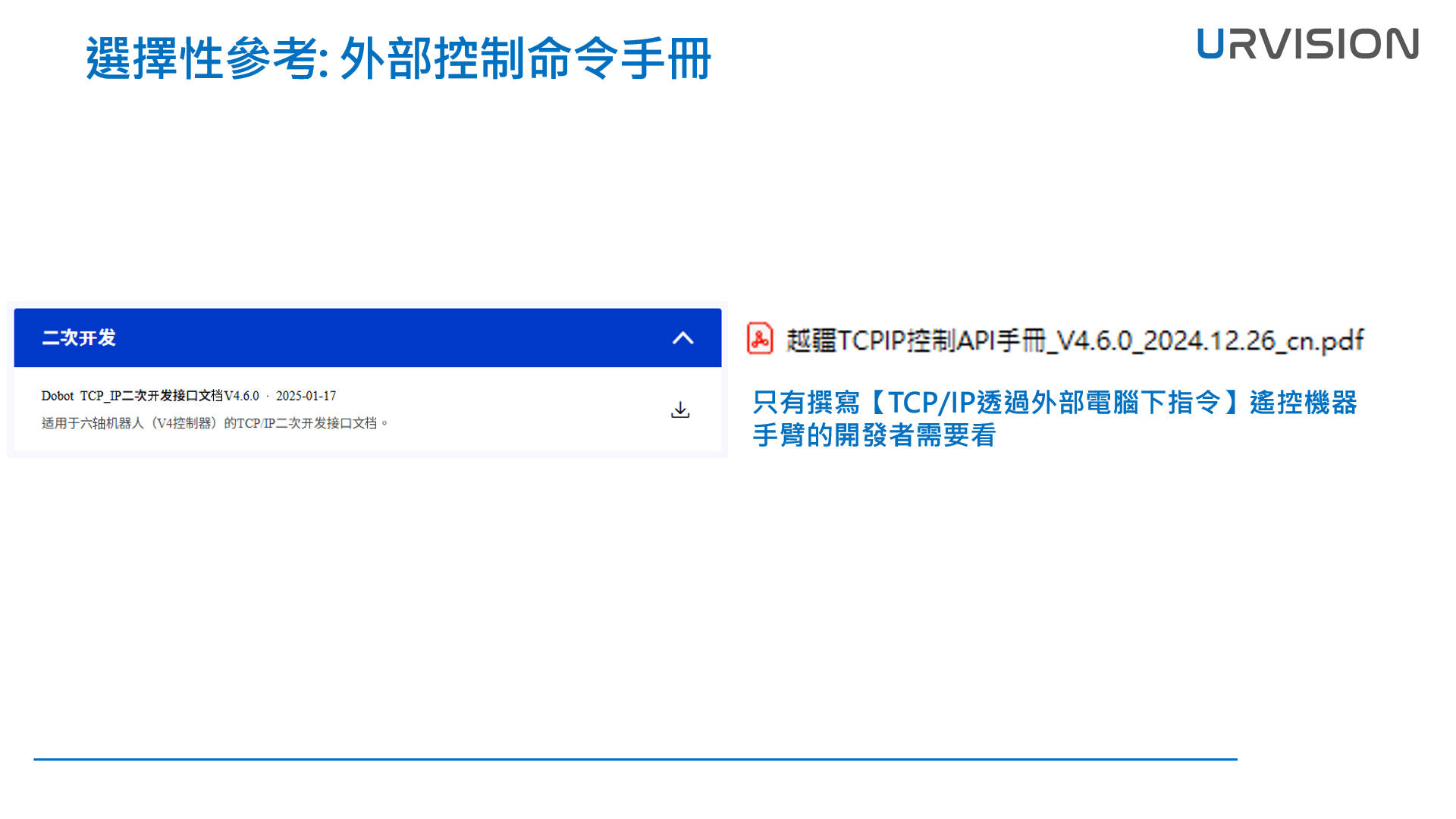
第三個是進階的API手冊,只供進階者參考。DOBOT手臂並不是只能透過DOBOT Studio Pro去撰寫及控制,它還有提供外部API,供進階的開發者下指令直接遙控。
三,硬體架設
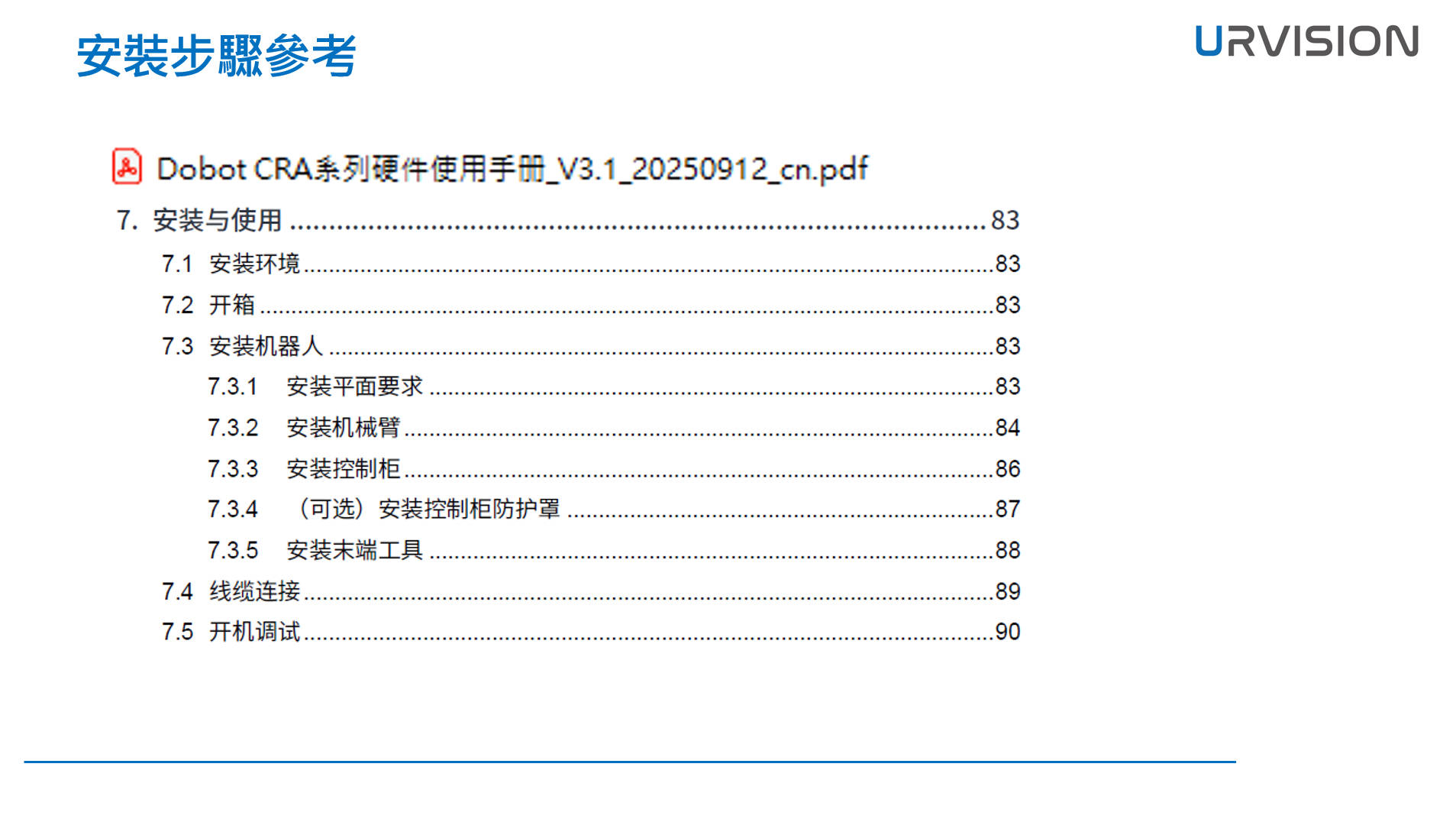
安裝詳細步驟可以參考剛才在【必下載1】提到的硬體手冊的第七章。
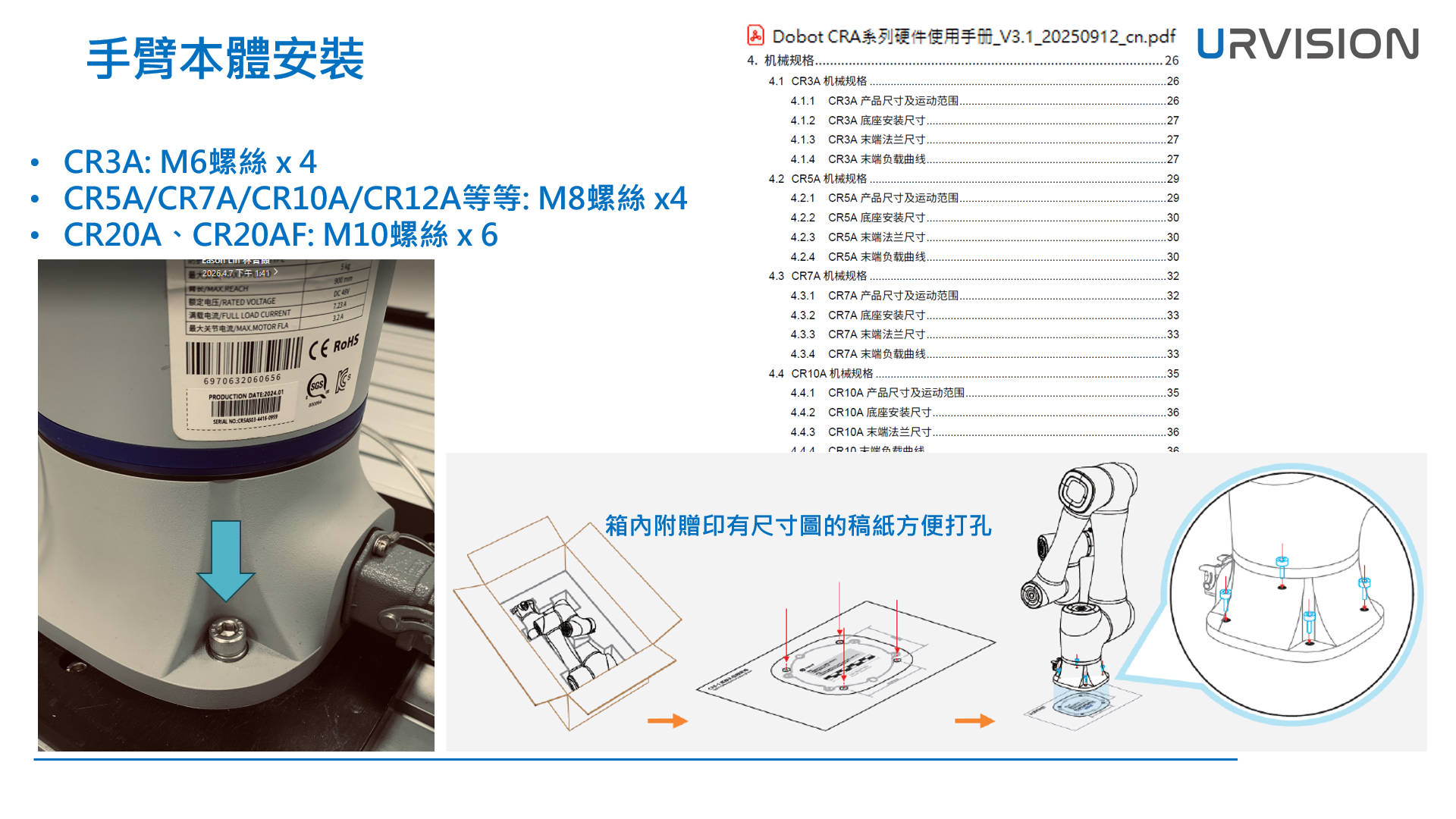
先將手臂本體用指定的內六角螺絲鎖固在平穩的平面上,如果平面尚未鑽孔,孔位尺寸可以參考硬體手冊,或是外盒中附的圖紙。
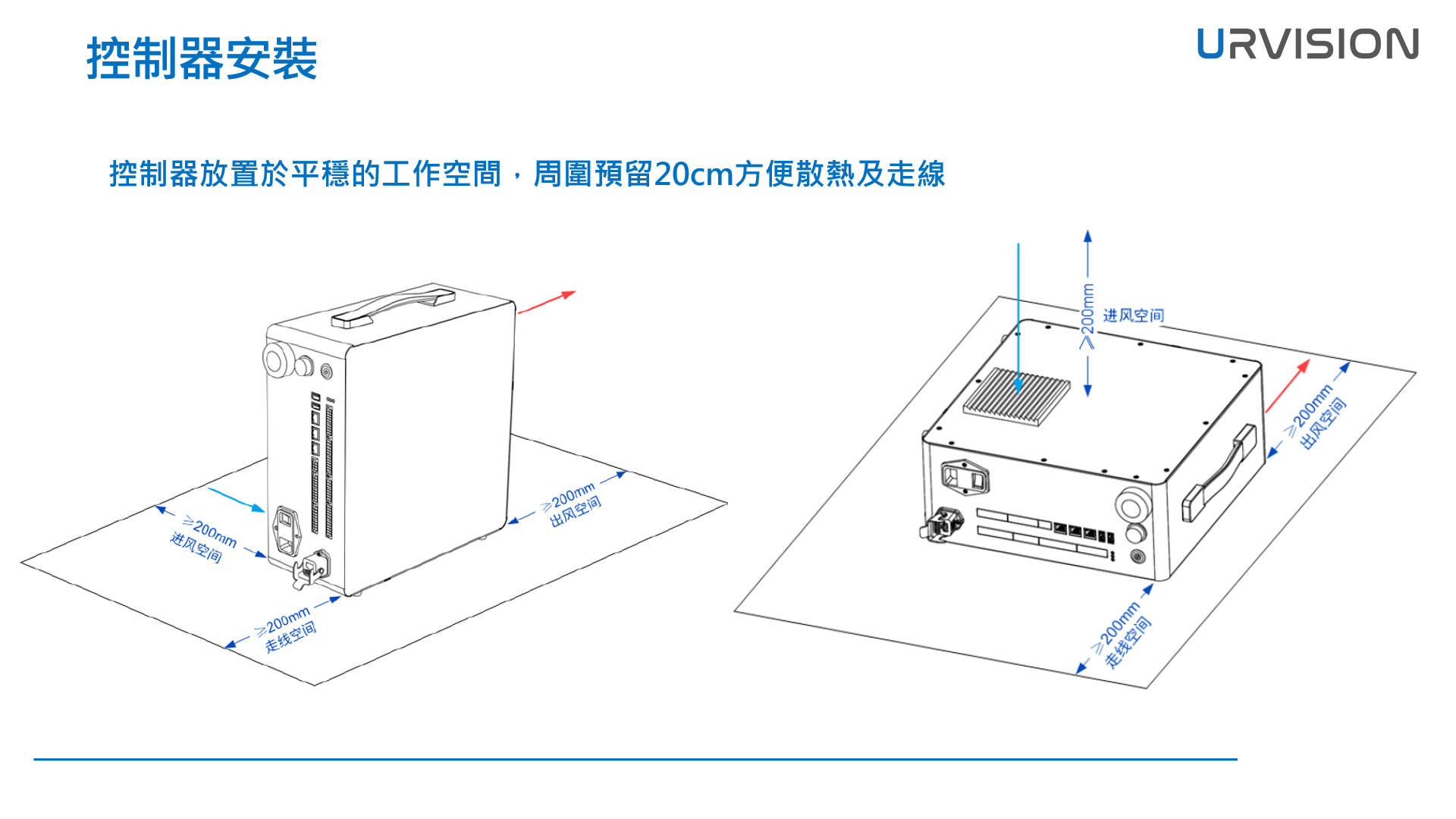
手臂控制器的外觀跟直立式桌上型電腦相似,將之放置於平穩的空間並保留走線及散熱通道。
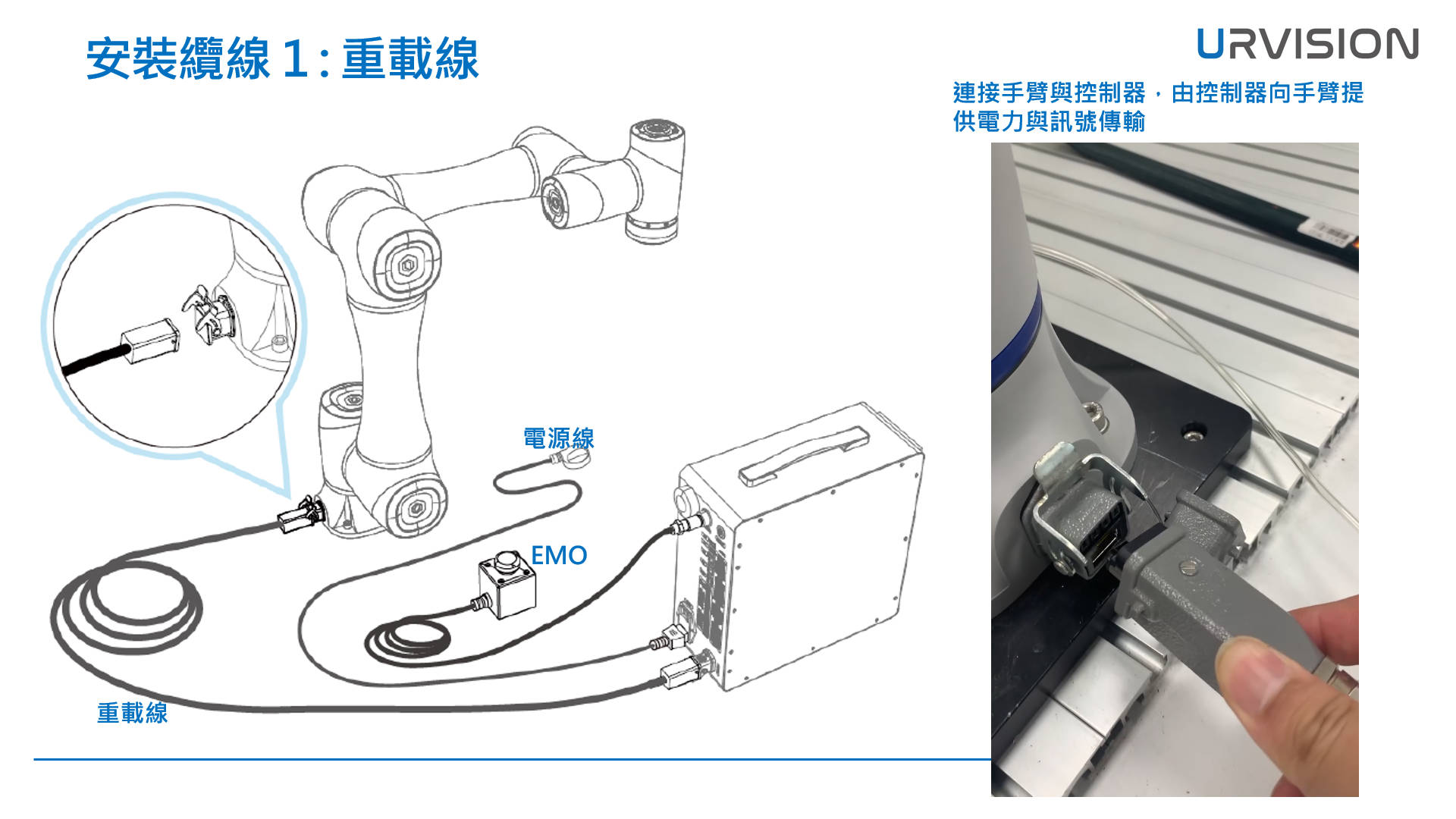
首先安裝【重載線】,這是用於手臂及控制器之間的電力、通訊連接通道,連接線插座有設置防呆,照方向插入後將防脫落卡榫扳緊卡住。
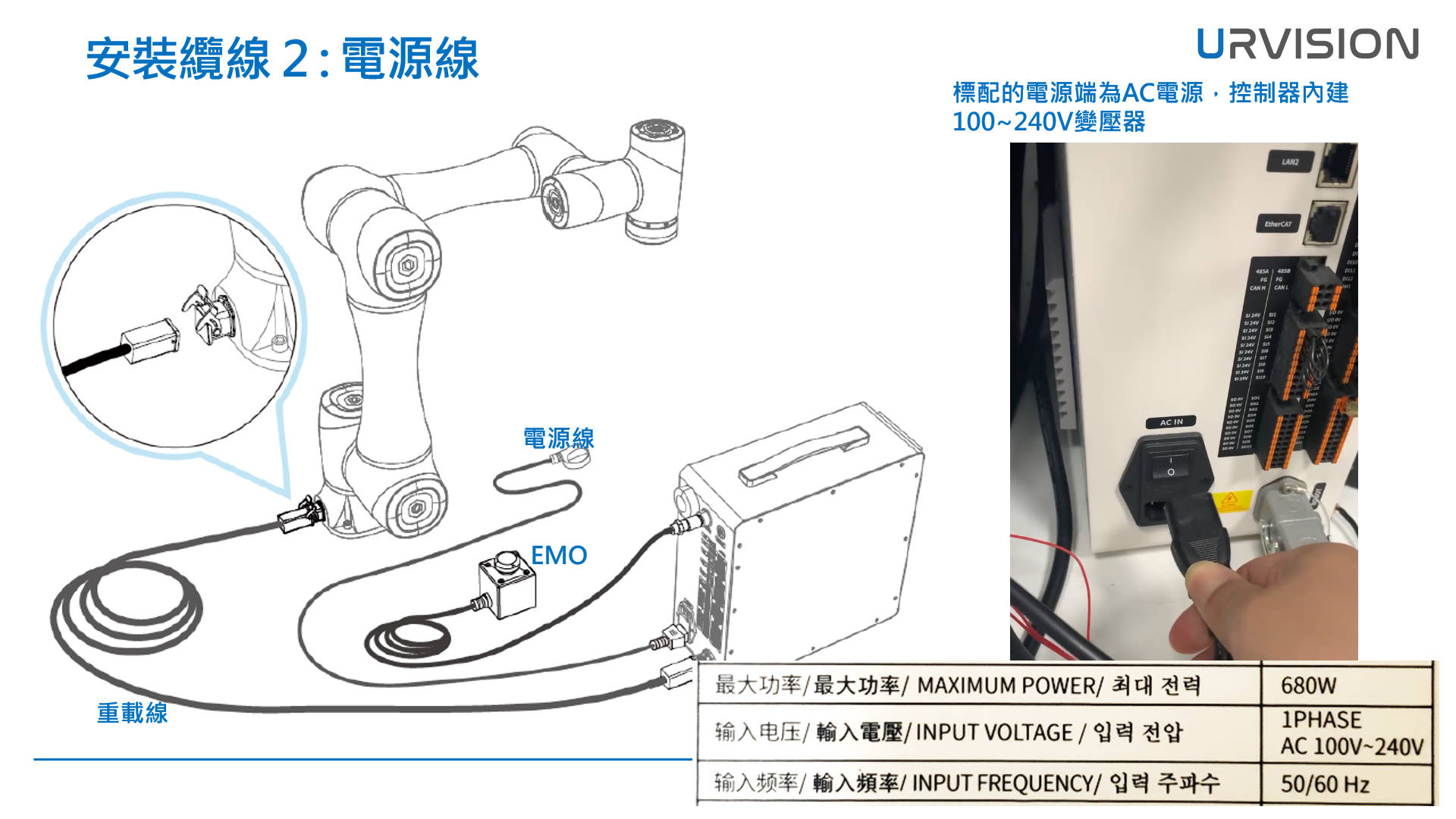
DOBOT標配的是AC 100~240V版的控制器,AC版內建變壓器,如需DC 48V版的控制器需在訂購時指名。安裝時將AC電源線連接到場內市電即可。
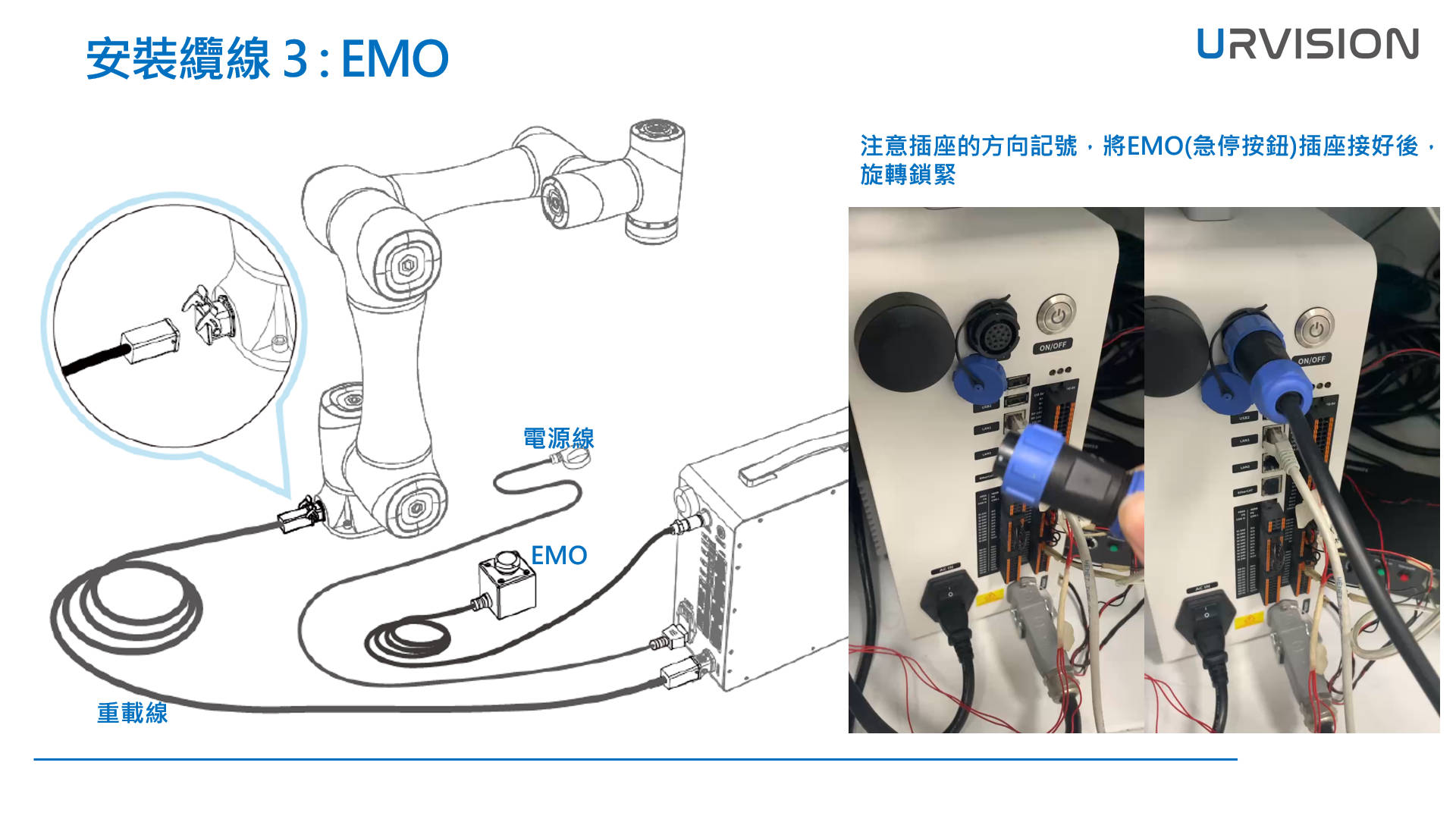
箱內有附原廠標配的EMO緊急停止按鈕盒,將連接線插座記號點對齊控制器上的插座插入後旋轉鎖緊。
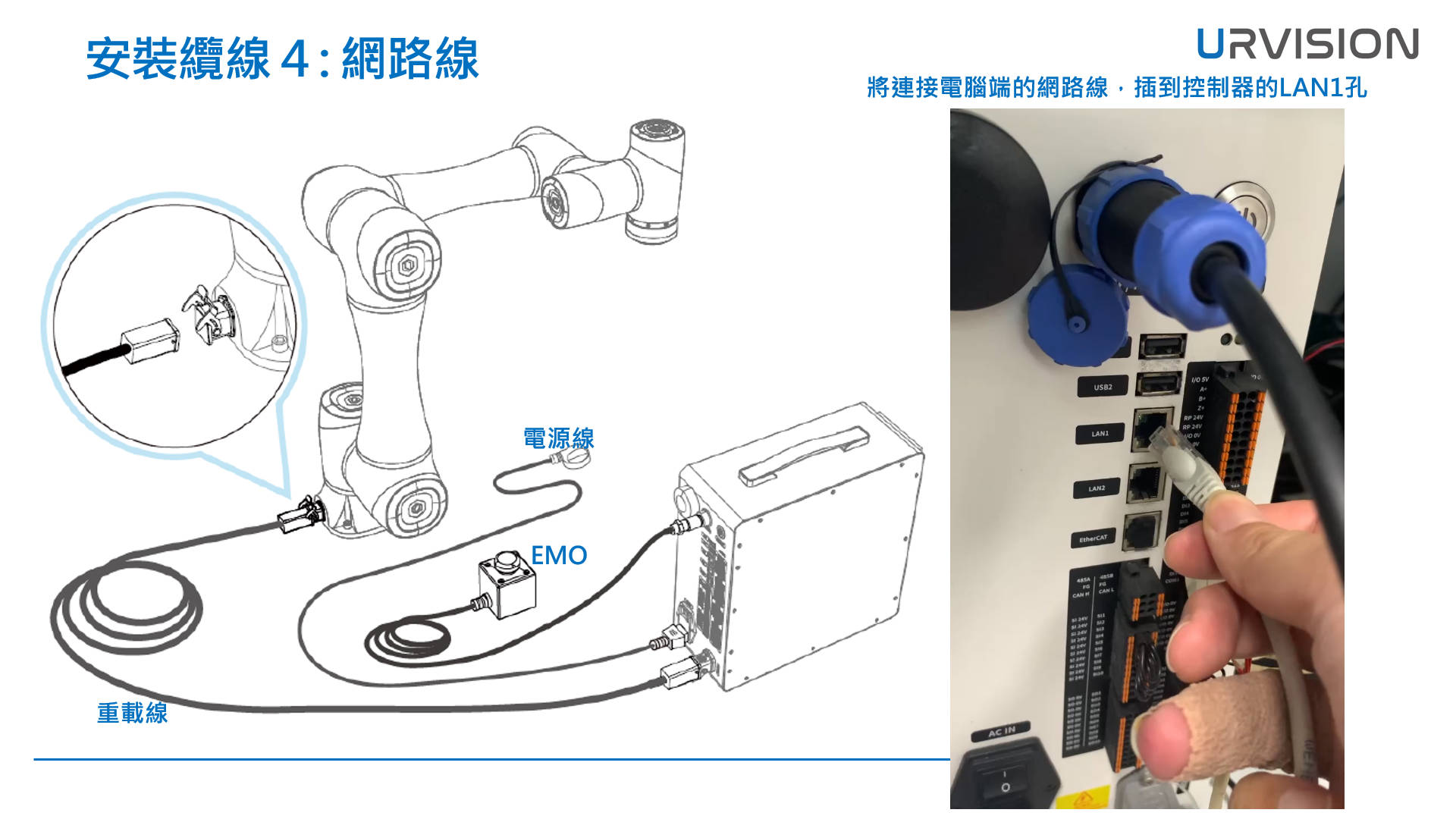
稍後會需要使用電腦開啟DOBOT Studio Pro,透過網路線來連上DOBOT手臂。將RJ45網路線插到控制器的LAN1孔,網路線僅用於傳輸控制封包,對速率規格要求不高,100M以上的即可,但如果工廠環境電磁干擾較多,建議使用CAT6以上帶金屬隔離線的線材,減少使用時斷線機率。
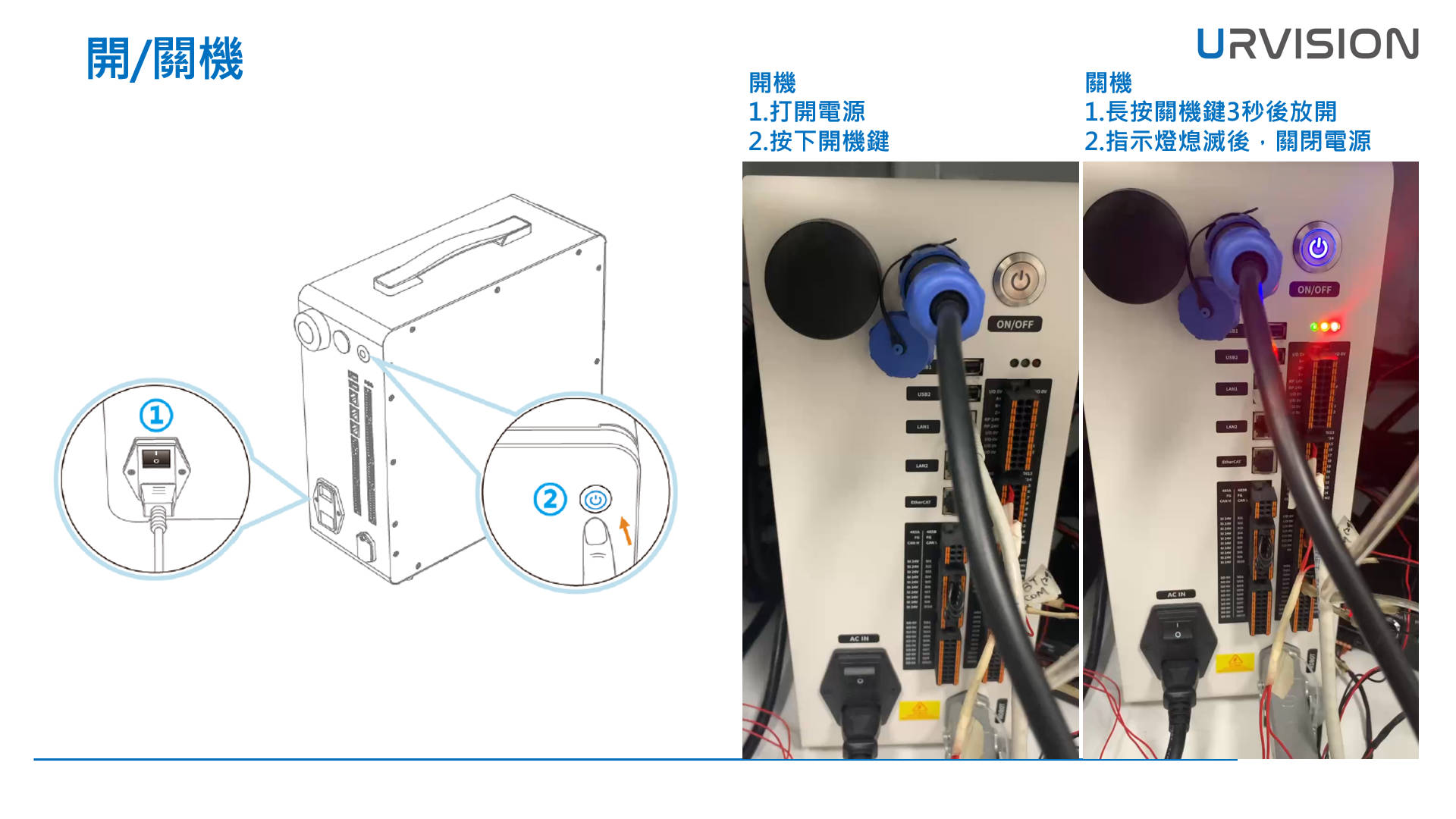
所有線材都銜接妥當以後,開啟電源、按下開機鍵就可以開機了。如果要關機的話,長按開機鍵3秒再放開,等燈號熄滅後,再關閉電源。
四,軟體安裝
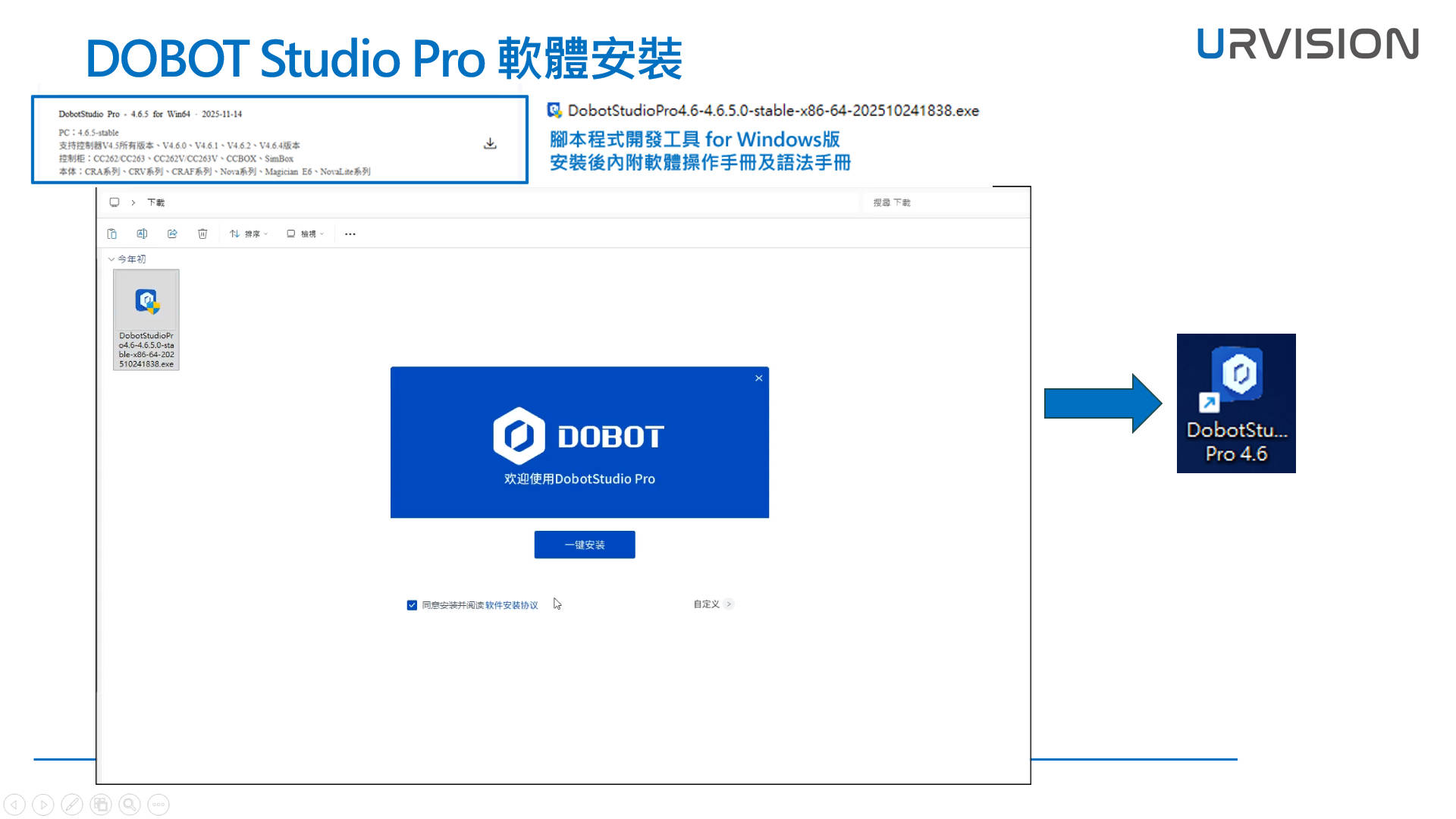
安裝DOBOT Studio Pro的方式非常簡單,只要點擊【一鍵安裝】即可。安裝完成後,桌面會出現DOBOT Studio Pro的捷徑。


因為DOBOT的功能都是做在控制器上面,包含程式腳本也是,本身是一個Server的概念;開發者的電腦只是扮演終端機的角色,DOBOT Studio Pro即是它的終端機顯示軟體,用途是讓開發者透過網路線連到手臂控制器上,去操作手臂、對手臂進行程式開發。

因此,若你的電腦本身未在自動控制架構中扮演任何重要角色(ex.視覺辨識、Recipe或上位總管等等),單純只是開發程式的時候使用,當你將手臂程式開發完以後,可以移除電腦,手臂能自行運作。
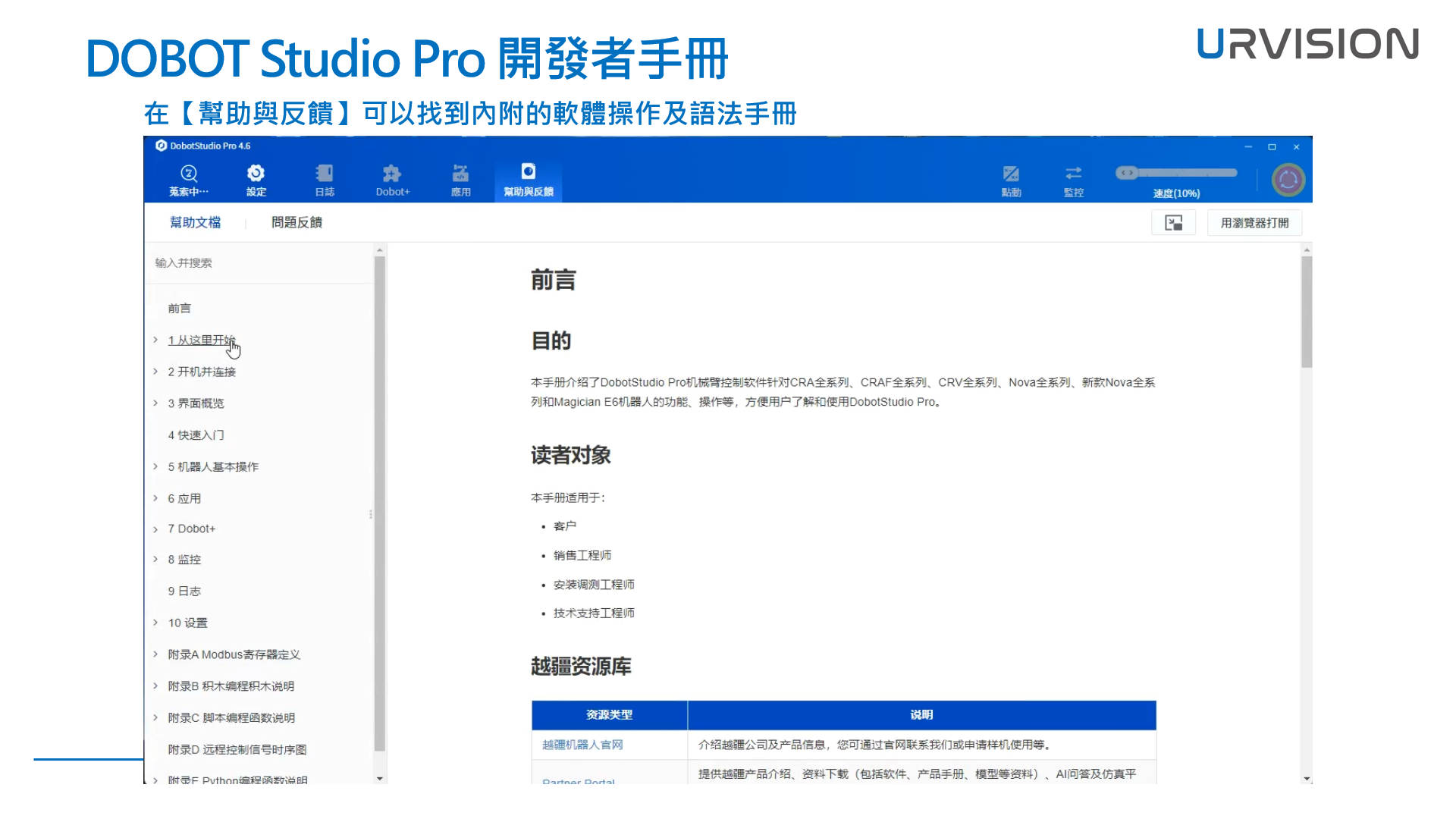
DOBOT Studio Pro安裝完成後,內建使用者手冊,可查詢軟體操作、程式語法等等,無須另外下載。
五,程式開發

使用DOBOT Studio Pro連接手臂之前,要先檢查確認電腦及手臂的IP是否連通。

連上手臂後,【使能】手臂 (Servo ON或激磁的意思),然後使用【點動】功能 (即JOG Mode) 手動移動手臂姿態。
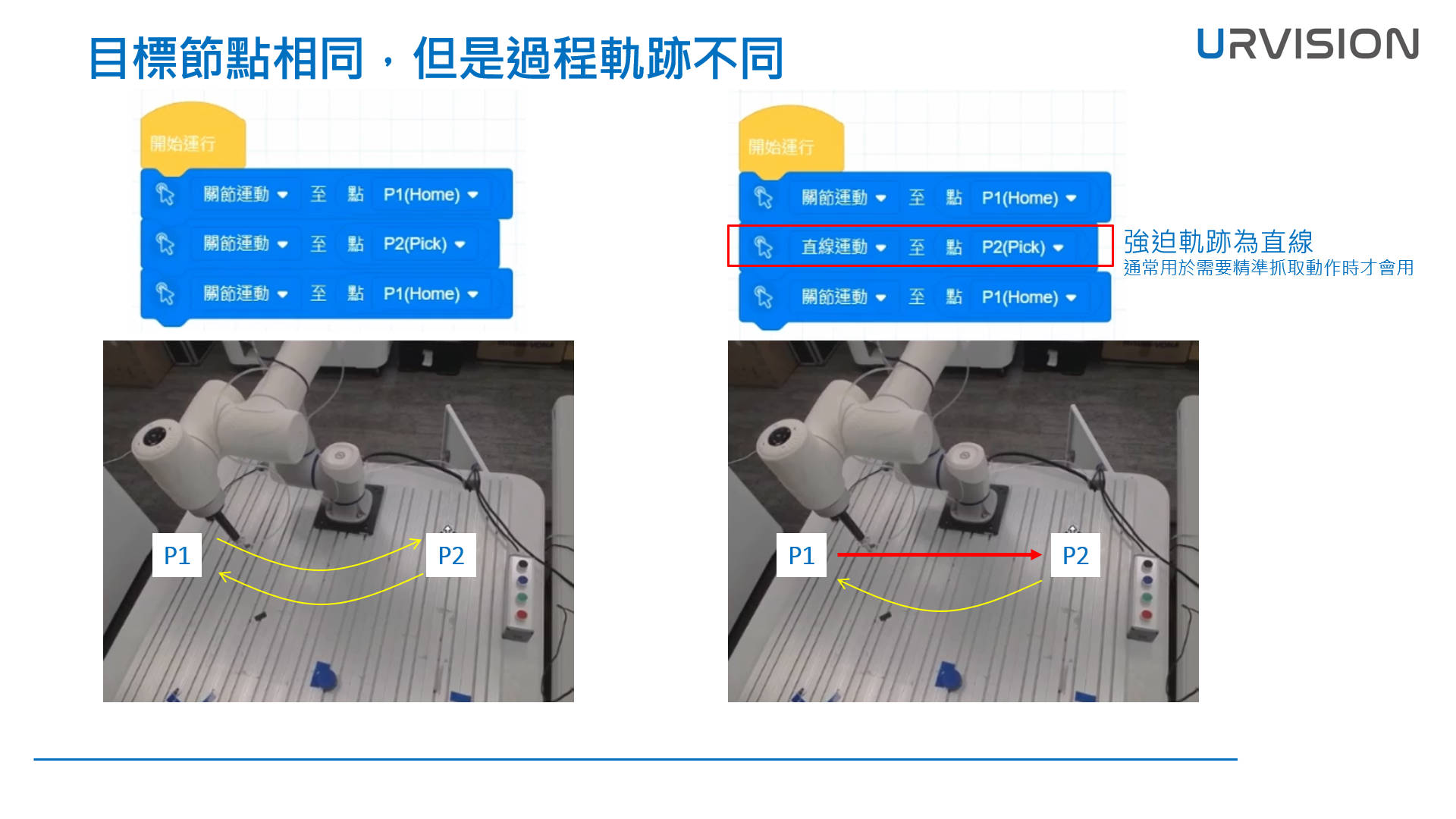
圖控程式教學
腳本程式教學

當程式開發及測試都完成後,你可以設定選擇要啟動控制器上指定的程式專案,將專案指派給IO,屆時只要將手臂開機、對IO輸入一個訊號,該程式專案就會開始跑,這個時候就可以不需要有電腦了。