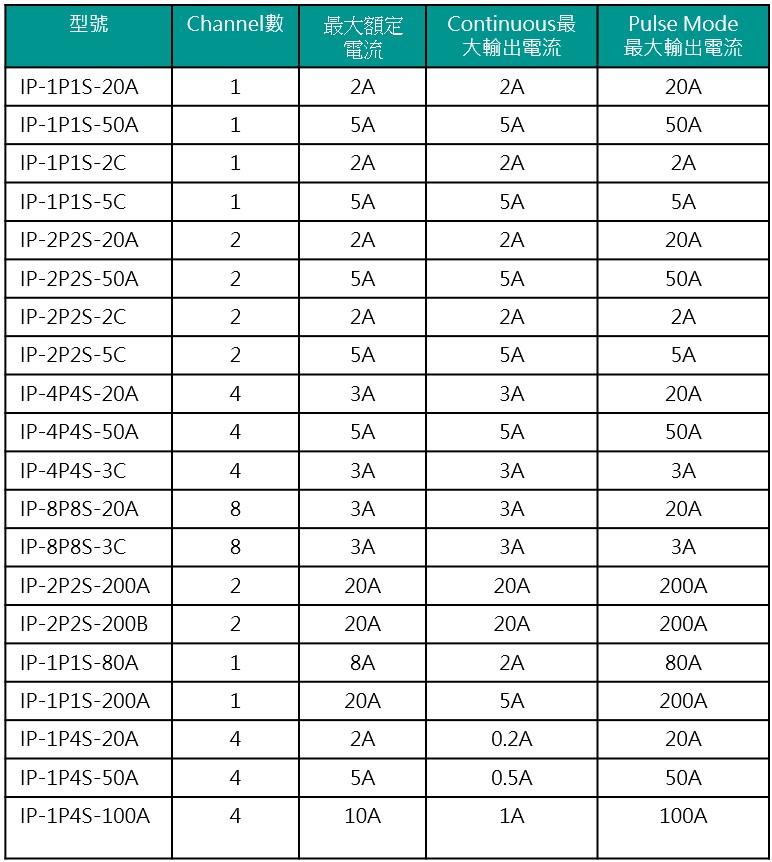
型錄規格表及選型方式
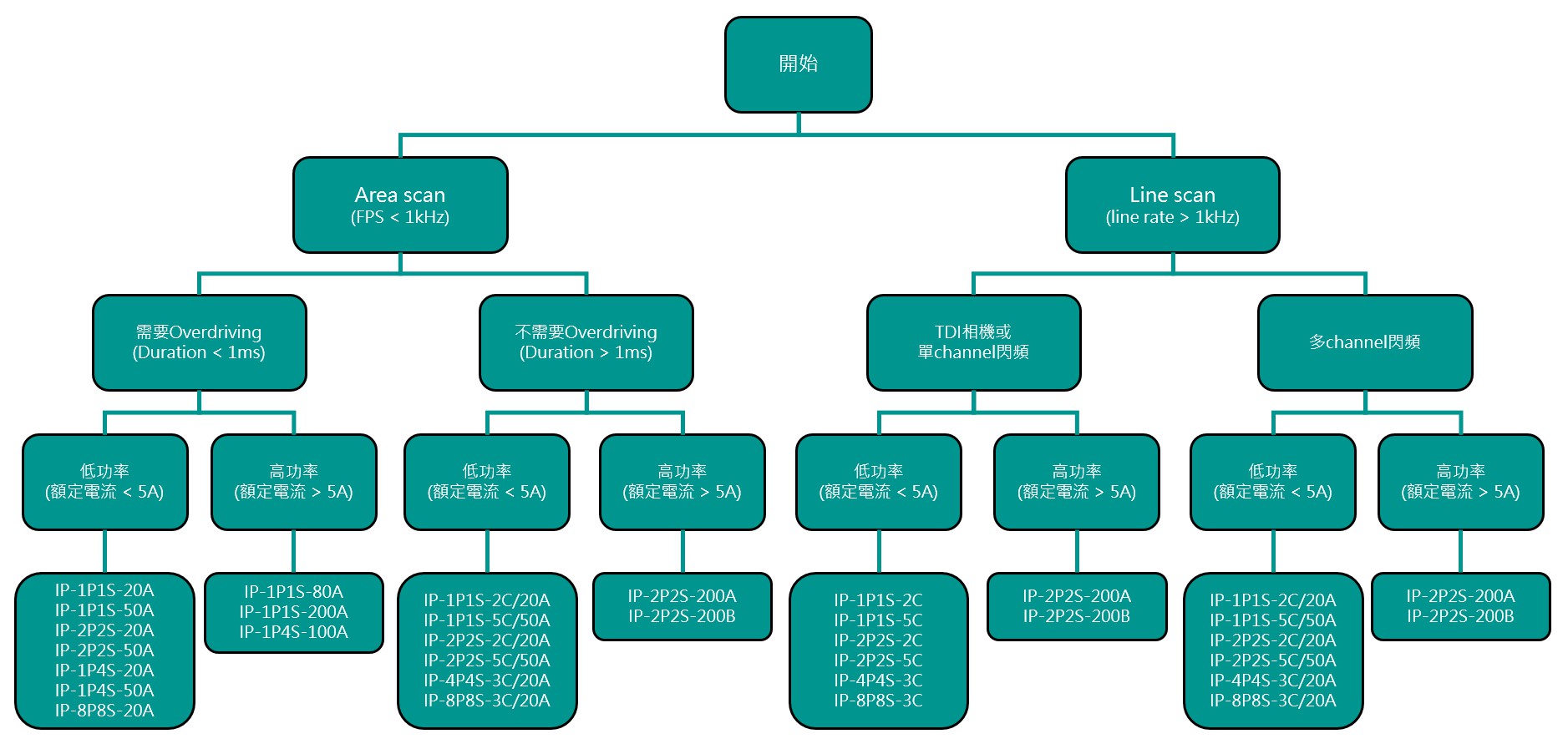
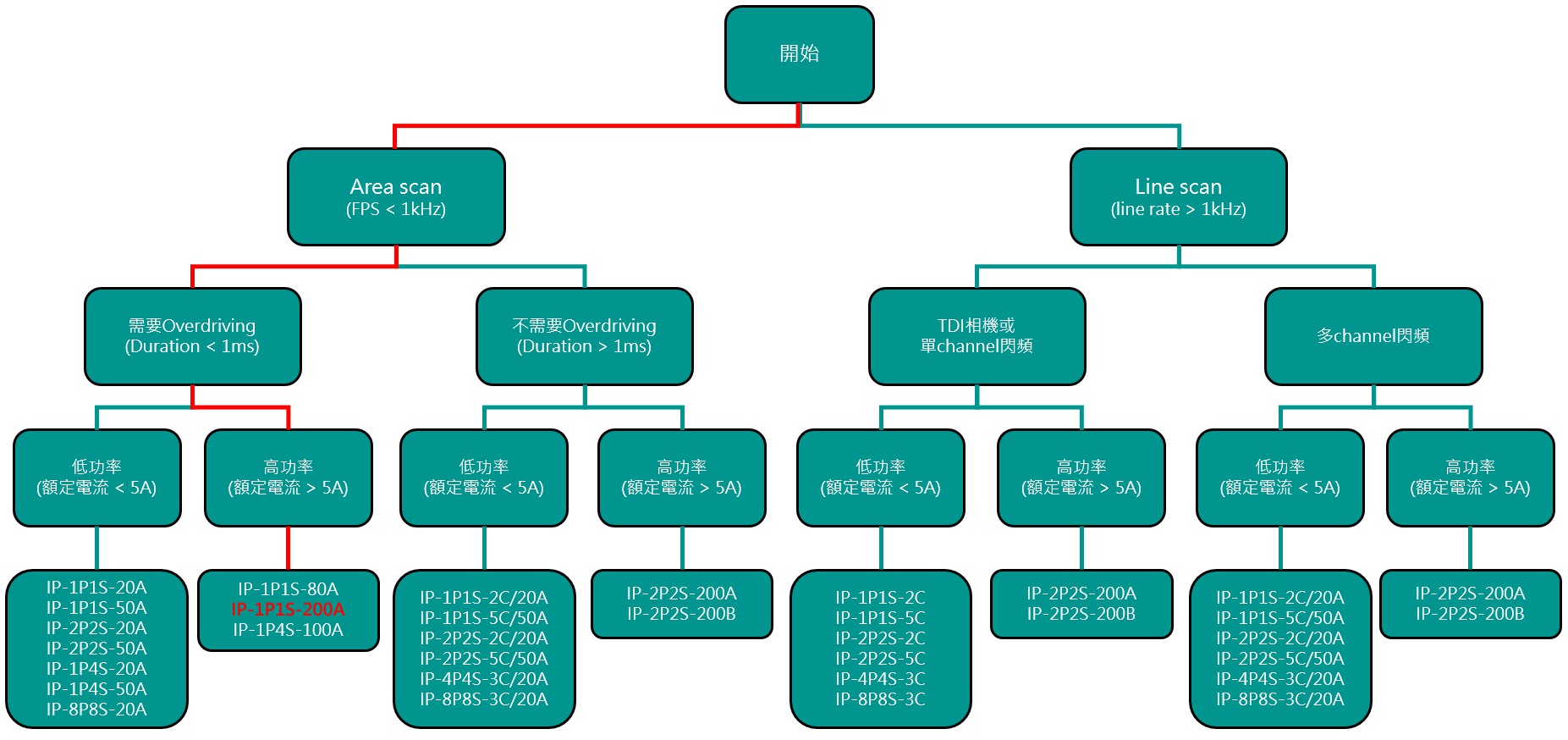
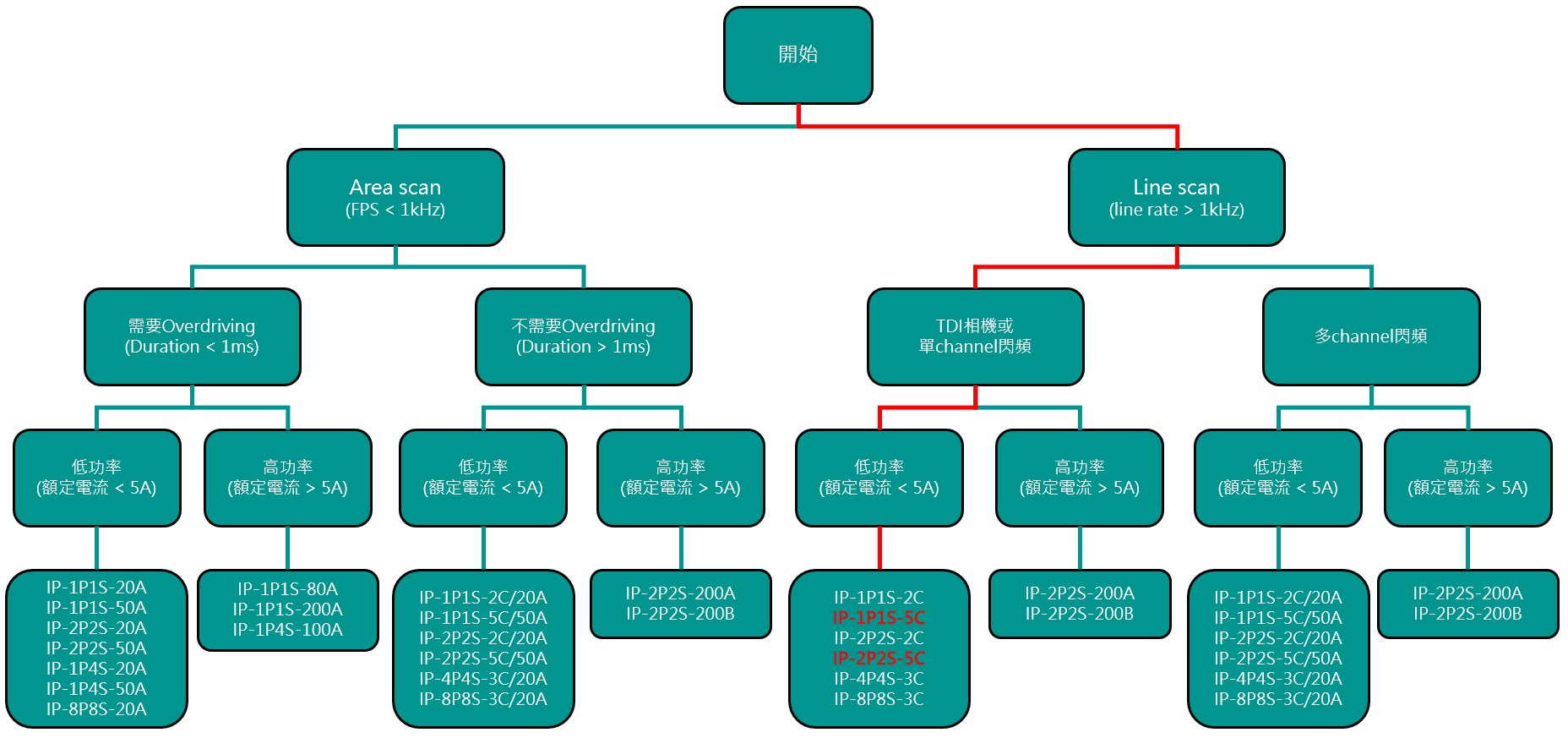
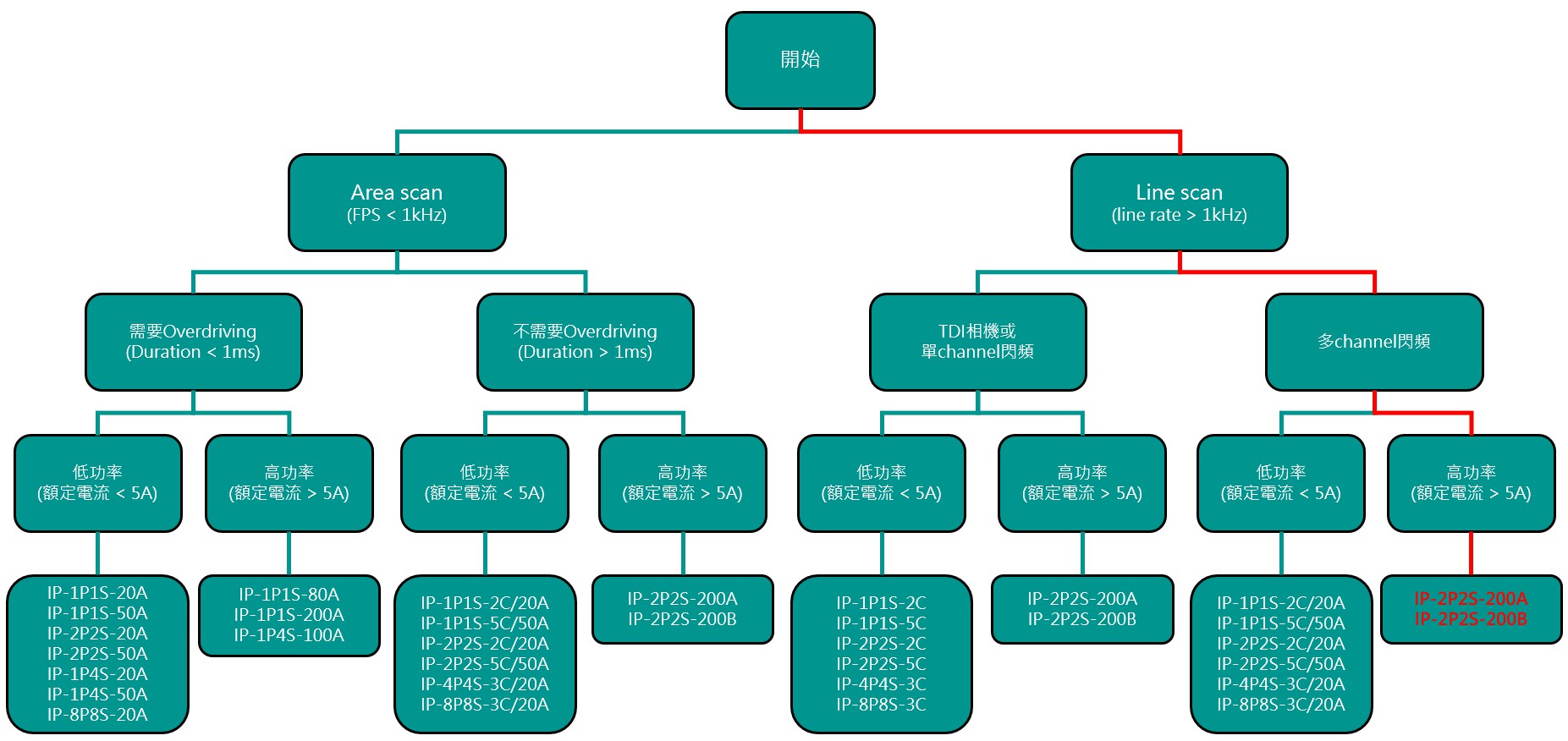
由於 iPulse 閃頻控制器系列型號眾多,為簡化選型規則,首先看到這張流程圖。我們從【開始】這邊出發,
- 左側是 2D 檢測,使用 Area 相機或稱面陣相機,通常拍攝頻率小於 1kHz
- 在 Area 相機類別中,分為需要 Overdriving 或不需要 Overdriving;如果你不知道到底會不會用到 Overdriving,可以這麼判斷,如果你的光源或相機曝光可以亮超過 1ms,這代表曝光時間算比較長的應用,我們認定可能不會用到 Overdriving;反之,曝光很短小於 1ms 的應用,也許會用到 Overdriving 來提升亮度。
- 接下來就是用 LED 額定電流來區分不同產品線。
- 右側是 1D 檢測,使用 Line Scan 相機又稱線掃描,拍攝頻率大於 1kHz
- 在 Line scan 相機類別中,不考慮 Overdriving,因為 Overdriving 超過 LED 額定電流以後需要趕快讓 LED 休息,但線掃描速度太快,LED 幾乎一直都在工作沒有休息時間。
- Line scan 類別分為單 channel 閃頻跟多 channel 切換閃頻的應用;因為 TDI 相機 sensor 的特性沒辦法多燈切換閃頻,所以被歸類在單 channel 類別。
- 接下來就是用 LED 額定電流來區分不同產品線。
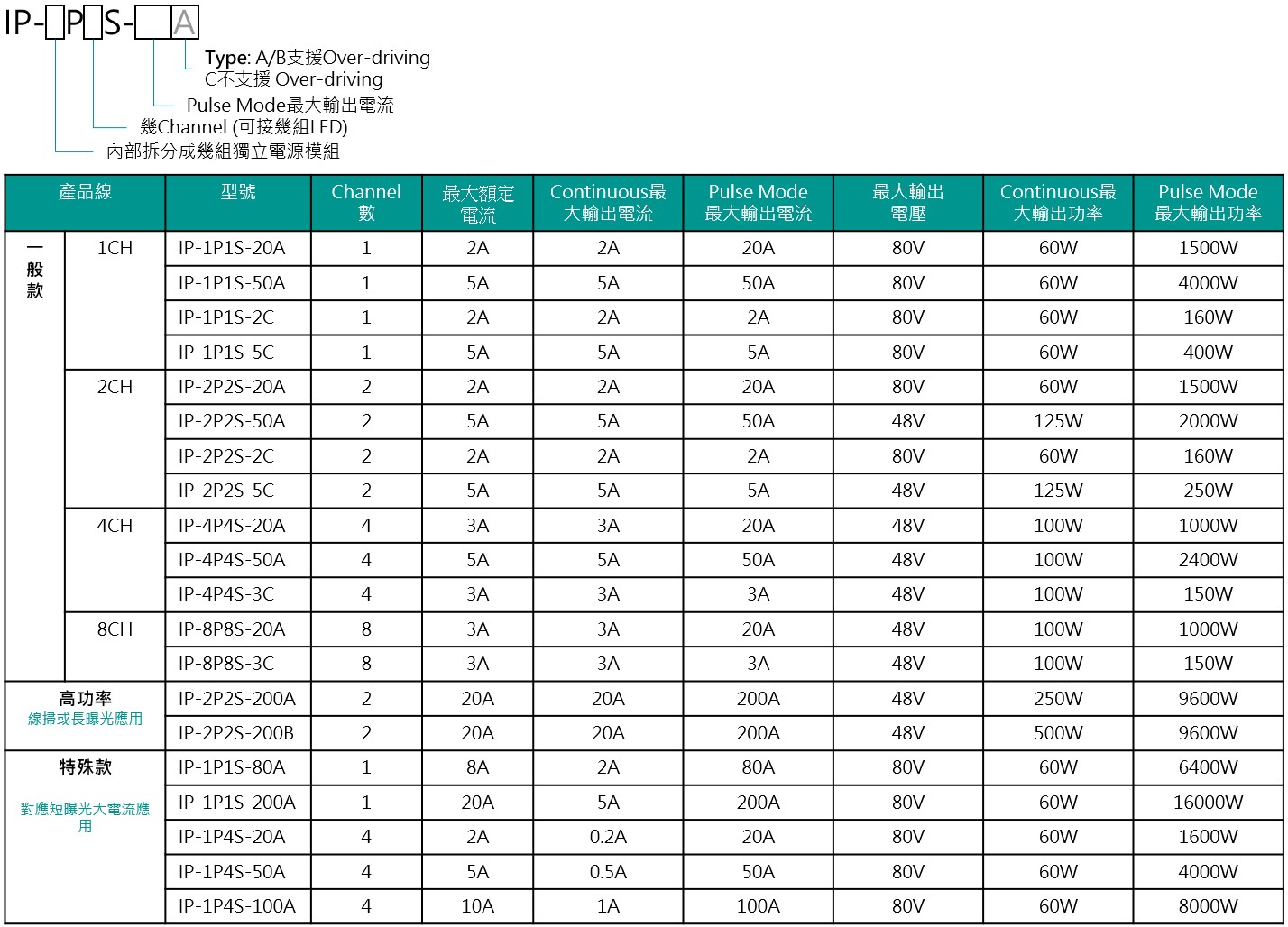
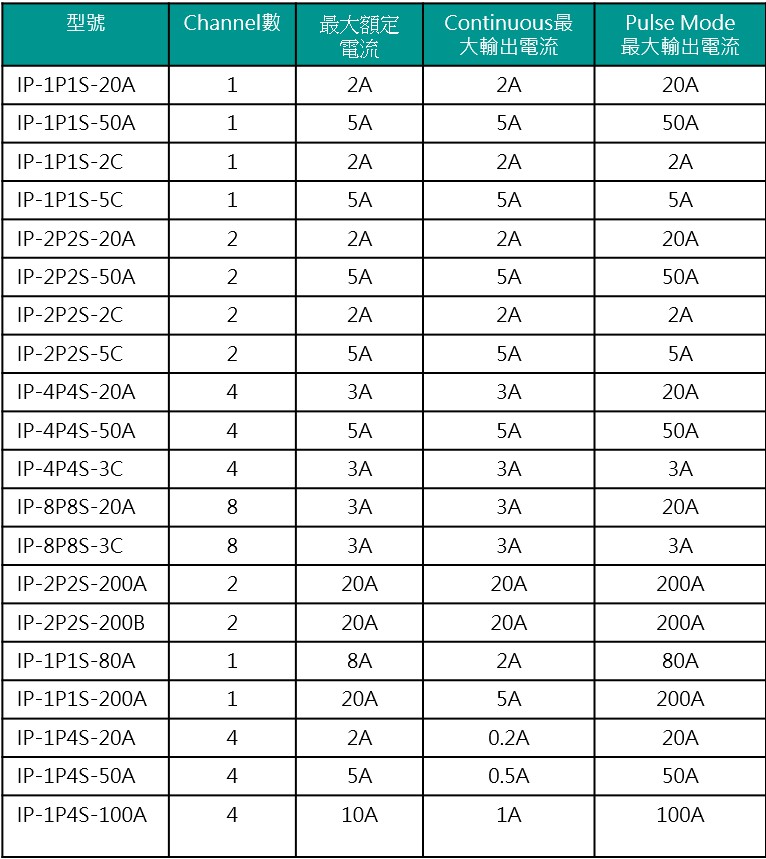
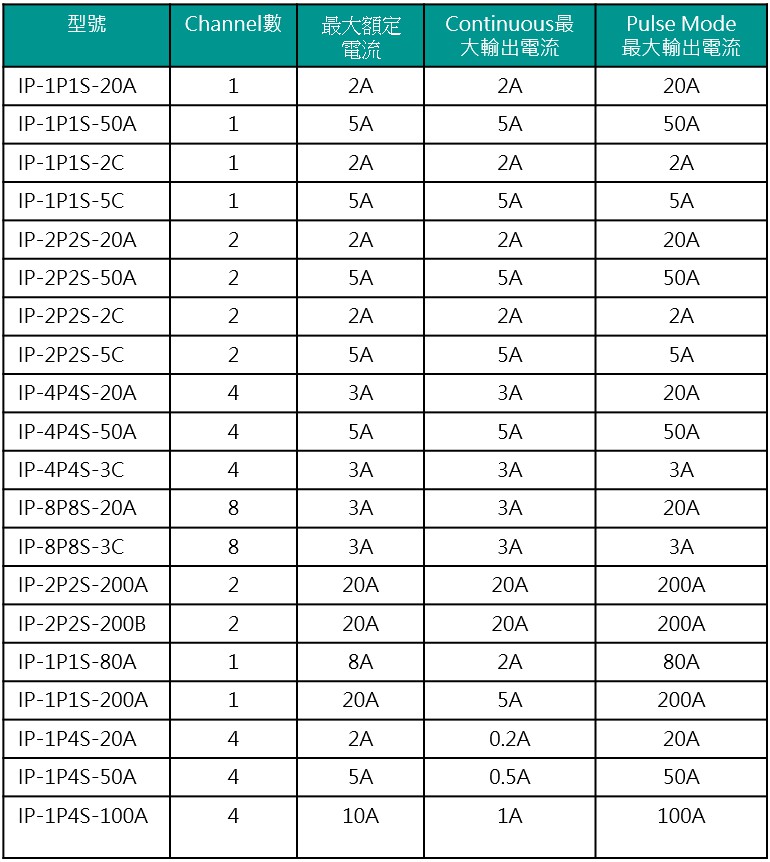
iPulse 控制器的命名規則,P旁邊的數字表示內部電源模組的個數,S旁邊的數字代表 channel 數。最後一碼數字代表安培數,注意,是 Pulse 閃頻模式的最大輸出電流的安培數,不是指常亮模式的電流;而結尾的英文字母,代表機種 Type,注意 C Type 不支援 Overdriving。
控制器大致分為一般款、高功率款、特殊款三種產品線,其中
- 一般款: 有 1、2、4、8 不同的 channel 區分
- 高功率: 對應線掃描高亮度大電流 LED 的應用,無論是常亮模式或 Pulse 模式都能輸出大電流
- 特殊款: 對應短曝光 (Pulse 模式) 需要大電流但是對常亮的電流需求不高的應用
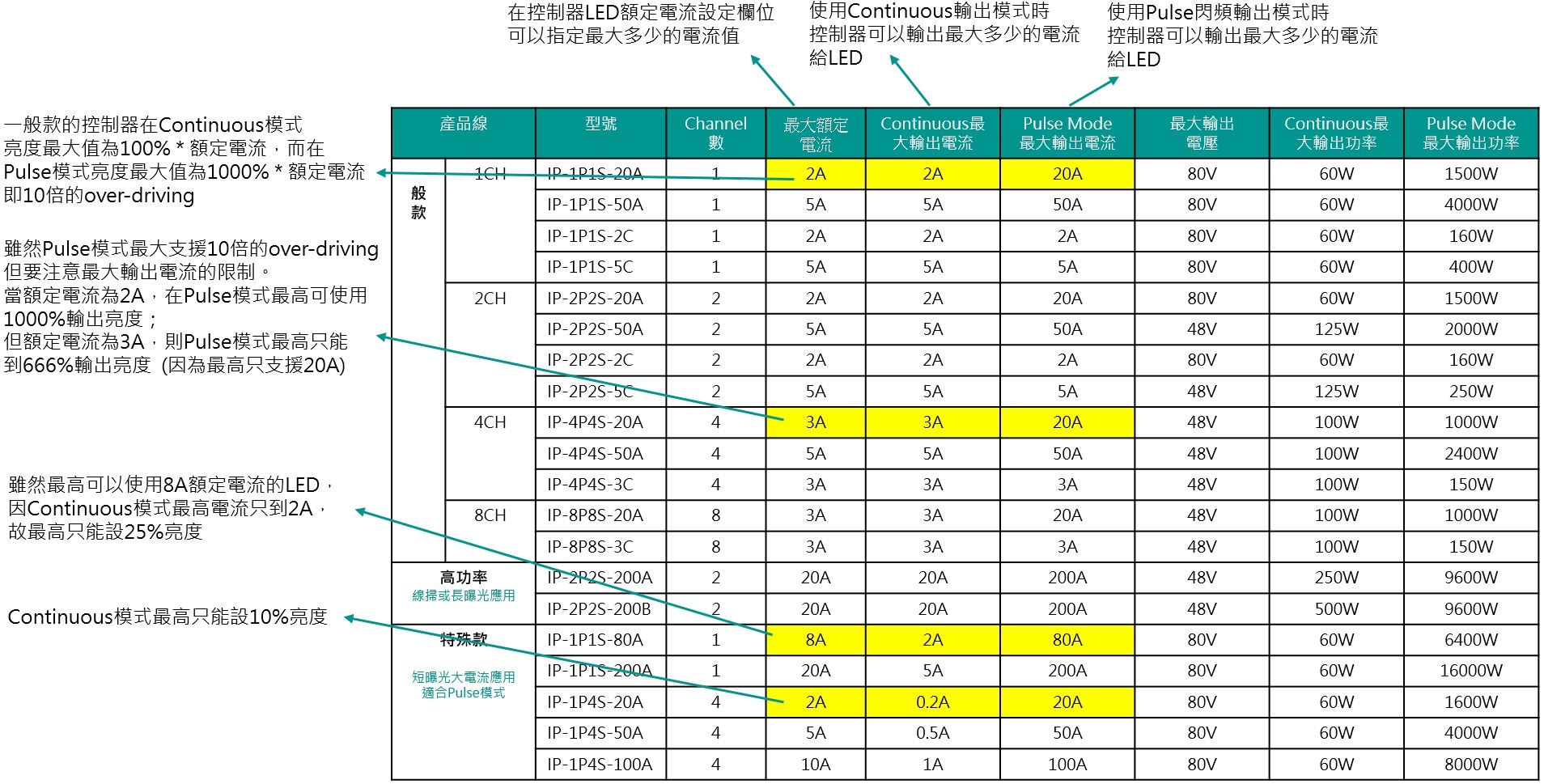
在查閱控制器規格表的時候需要注意一些地方
- 最大額定電流: 控制器有一個設定欄位需要告知你接上去的 LED 燈的額定電流安培數。什麼是額定電流? 指的是該 LED 在常亮並且發揮最大效率的時候的穩定工作電流 (並且不會燒掉),額定電流跟 LED 顆粒以及你的電路、散熱設計都有關係。當你準備接一盞額定電流 3A 的 LED 燈到控制器上,必須要先在控制器的額定電流欄位設定該數值為 3A,然後再透過控制器的 Brightness 百分比去調整亮度,0% 代表不輸出、50% 代表半開 (也就是 1.5A 電流)、100% 代表亮度全開 (也就是 3A 電流);超過 100% 就是所謂的 Overdriving,例如設 300%,表示你想拿 3A 額定電流的燈讓它用 9A 去跑。要注意的是,每台控制器支援的額定電流最大值不一樣,所以選型的時候要看。
-
只要是討論到 Overdriving,就必然是討論 Pulse 模式,前面有提過 Overdriving 以後需要休息,只有 Pulse 模式能讓 LED 燈快速閃一下關掉,等一段時間再閃一下,所以只有 Pulse 模式有支援 Overdriving。一般 Pulse 模式可以支援 10 倍的 Overdriving,但是部分產品有例外規則,所以要注意看規格表。
選型及搭配其他注意事項
- 關於LED順向電壓、LED額定電流、一台相機對幾盞燈
- 電壓相關: 如果不使用到Overdriving功能,那選用的控制器的最大輸出電壓規格只要大於LED順向電壓即可
- 電壓相關: 如果要使用到Overdriving功能,那控制器的最大輸出電壓規格必須大於 2 ~ 3 倍的LED順向電壓
- 舉例: 當LED順向電壓為24V、額定電流3A,想使用over-driving 10倍,則需要挑選最高 24 * 2 = 48V 輸出的控制器,例如 IP-4P4S-20A
- 舉例: 當LED順向電壓為40V、額定電流3A,想使用over-driving 10倍,則需要挑選最高 40 * 2 = 80V 輸出的控制器,例如 IP-1P4S-20A
- 額定電流有最小值的限制,不要用額定電流太小、小於200mA的LED,可能會有問題。跟順向電壓是幾V無關。
- 舉例: LED 24V / 2W → 不支援,因為額定電流是 2/24 = 83.3mA < 200mA
- 舉例: LED 24V / 5W → 有可能不支援,因為額定電流是 5/24 = 208.3mA,在可控制的邊緣
- 舉例: LED 24V / 10W → 支援,適用低功率款控制器
- 舉例: LED 3V / 50W → 支援,是用高功率款控制器
- 雖然多Channel的控制器可以支援多盞燈,但是除了IP-2P2S-200A/B這款控制器有2個Trigger Input以外,其他所有款式不管幾個Channel的控制器都只有1個Trigger Input,換句話說,如果你有1台相機就必須搭1台控制器,2台相機就搭2台控制器,用相機的輸出訊號去Trigger控制器。
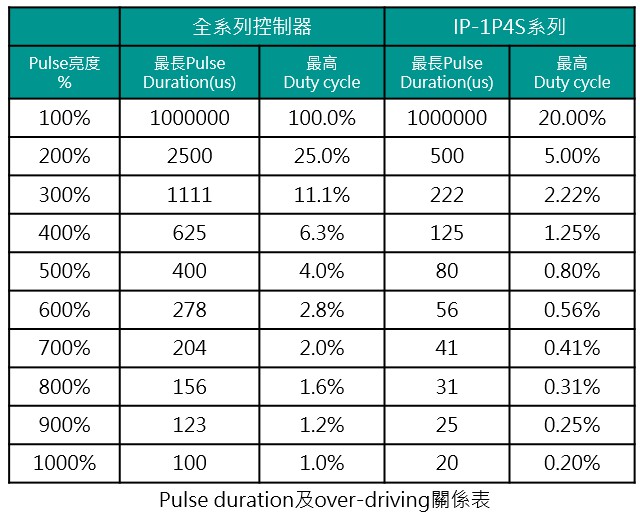
- 關於最長的Pulse脈寬(duration)及佔空比(duty cycle)
- 定義Duty cycle = pulse脈寬 / 拍照間隔時間
- 用Area相機做2D飛拍檢測的應用中,最長的Pulse脈寬其實就是你曝光最長可以多久,不會導致移動中拍攝的物體曝光糊掉,一般我們抓物體在相機 sensor 上移動小於 1 pixel 所需要的時間,或更短,此時間與光學解析度及鏡頭倍率有關。
- 用 Line scan 掃描的應用中,最長的Pulse脈寬其實就是line rate的倒數;那如果有搭配多channel輪流閃,則最大 duty cycle = 1 / channel數
- 因為使用Overdriving需要讓LED休息,閃頻控制器為了保護LED,當你使用Overdriving功能時,控制器韌體內部會故意限制最高能使用的Duty cycle,如上表,例如Overdriving若設為400%,4的平方=16,故粗估最高能使用的Duty cycle約為1/16 = 6.3%
- 當要選擇控制器功率規格的時候,要先知道LED平均功耗 (Avg. Power Consumption) 怎麼估算
- Area相機應用中
- 如果pulse脈寬 < 1ms,則平均功耗 = duty_cycle * LED功率
- 如果pulse脈寬 > 1ms,經驗法則當作它是常亮的,則視為平均功耗 ≒ LED功率
- Line Scan相機應用中
- 如果只有一盞燈,當作LED是常亮的,則平均功耗 ≒ LED額定功率
- 若為多channel輪流閃頻,則
- 功耗總和 = (duty_cycle * LED1功率) + (duty_cycle * LED2功率) + . . .
- 平均功耗 = 功耗總和 / channel,需小於控制器的常亮最大輸出功率規格
- Area相機應用中
選型案例1: 2D飛拍
題目: 使用10 fps的Area Scan相機,拍攝移動快速的物體,已知經過光學解析度的估算,為了防止影像糊掉,需要把閃頻脈寬(pulse duration)壓縮在200us以下。預計使用3.3V / 21A的 LED,因為曝光非常短,需要透過Overdriving來提高亮度。
- 因為LED額定電流是21A,只有IP-1P1S-200A以上的規格可以支援
- LED順向電壓是3.3V,若要Overdriving十倍,控制器至少要選能輸出6.6V的電壓。IP-1P1S-200A可以輸出80A,有符合需求。
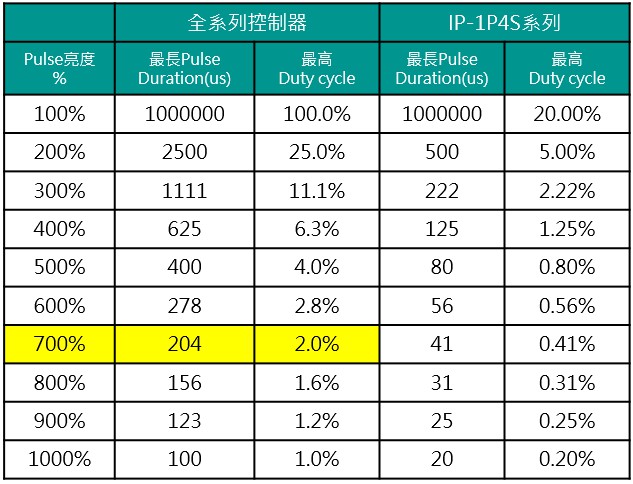
- 假設pulse duration想要200us,那根據duty cycle表格限制條件,Overdriving最高只能設700%。反過來驗算一下,因為相機是10 fps,最快工作頻率情況下間隔時間最短為100ms,故duty cycle = 200us / 100ms = 0.2%,低於控制器限制的2%,有符合需求。
- LED功率為3.3V * 21A = 69.3W
選型案例2: 2D靜止拍
題目: 使用20 fps的Area Scan相機,物體會靜止5ms拍完照再馬上移走。使用4盞規格同為24V / 3A的LED燈輪流閃,做檢測應用。
- 因為5ms內要拍4張,故單次的最長duration = 5ms / 4 = 1.25ms
- 每次曝光的最長間隔時間為1/20 = 50ms
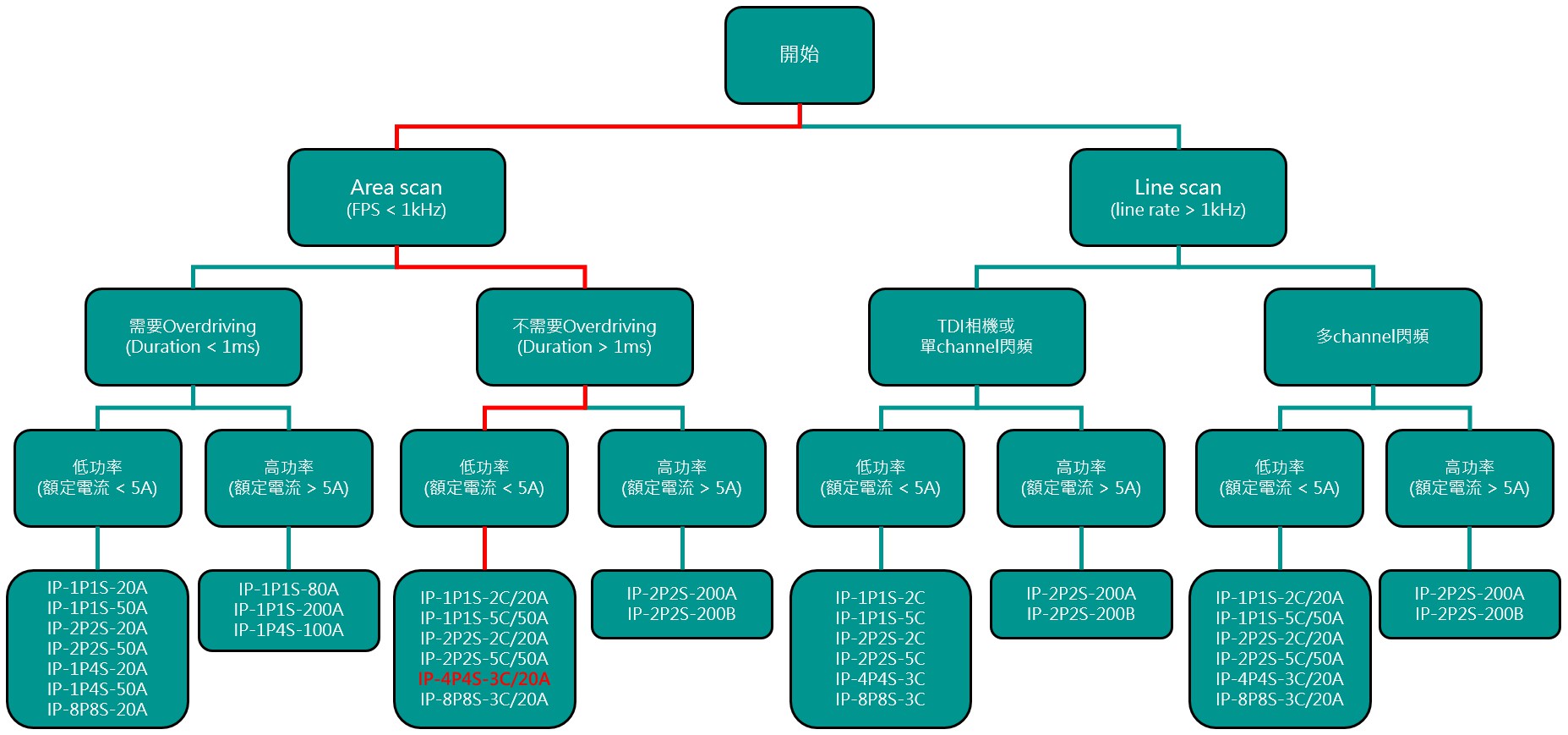
- LED額定電流為3A,可以使用 IP-4P4S-3C 或 IP-4P4S-20A
- LED順向電壓是24V,這兩台都有支援到48V,符合需求
- 因為1.估算最長duration為1.25ms (1250us),查duty cycle表得到最高能使用的Overdriving大約為300%。這時候可以先審視一下,如果需要Overdriving功能,則只能選用IP-4P4S-20A,如果不考慮Overdriving則可以使用IP-4P4S-3C。
- LED功率為24V * 3A = 72W
- 平均功耗為 72W * duty_cycle = 72W * 1.25ms / 50ms = 1.8W,有符合控制器功率規格
選型案例3: TDI線掃搭低功率燈
題目: 使用Line rate為100kHz的TDI Line Scan相機,搭配一盞LED燈,規格為24V / 3A。
- LED額定電流是3A,可以選 IP-1P1S-5C 看看
- LED順向電壓是24V,這台有支援到80V,符合需求
- 每次曝光的最長間隔時間為1/100kHz = 10us
- LED功率為24V * 3A = 72W。若duty cycle為100%,則功耗為72W,但IP-1P1S-5C最高只有到60W,有一點點小不足
- 承上,如果亮度是優先條件,則需要升級到最大功率有125W的IP-2P2S-5C,但是只用到一個channel,會比較浪費一點
- 若覺得亮度可以稍微妥協,還是可以採用IP-1P1S-5C
選型案例4: 一般線掃搭配高功率燈
題目: 使用Line rate為100kHz的一般Line Scan相機,搭配兩條規格為24V / 10A 的LED線燈,兩條輪流切換、一邊切換一邊掃。
- LED額定電流是10A,可以選 IP-2P2S-200A 或 IP-2P2S-200B
- LED順向電壓是24V,這兩台都有支援到48V,符合需求
- 每次曝光的最長間隔時間為1/100kHz = 10us
- 單支LED功率為24V * 10A = 240W。若兩條輪流閃,則duty cycle為50%,則平均功耗為240W*50% + 240W*50% =240W, 檢視IP-2P2S-200A有250W的功率已經足夠,不需要升級到IP-2P2S-200B
- 如果其中一支LED換成 36V / 10A 規格呢? (假設兩支燈不一樣)
- 平均功耗為240W*50% + 360W*50% =300W,這樣就需要升級到IP-2P2S-200B,因為最高可提供500W
Trouble-shooting常見問題
是否懷疑控制器提供的電壓沒有滿足 (推不動) LED的順向電壓 ?
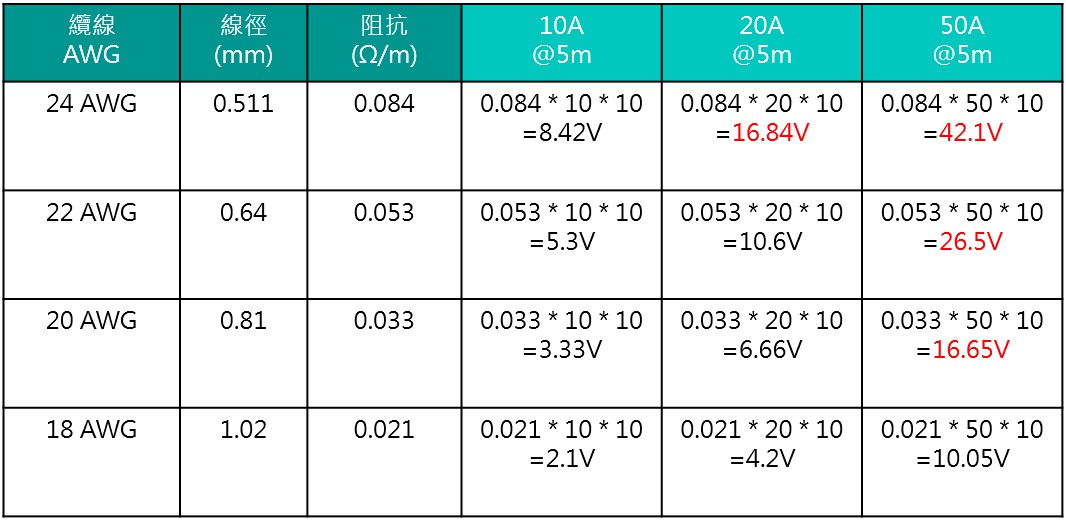
通常是壓降造成的,纜線長度及LED燈本身都會造成壓降,纜線造成的壓降與長度及線徑有關,有公式可以估算:
壓降 = 單位長度阻抗 * 電流 * 線長
當你使用Overdriving時,因為電流變高了,所以壓降也隨著提高了。舉例來說,當你在24AWG、5米的纜線上推動50A的pulse電流時,其實纜線兩端的壓降已經達到42.1V,所以要減輕這個效應最好使用更粗更短的LED電源纜線來銜接控制器。
此外,如果你的LED燈原本是設計給定電壓控制器用的,電路板模組上面會安裝限流電阻用來保護LED只吃到很小的分壓。這種情況就不只是纜線會造成壓降,這些限流電阻還會拖慢pulse上升及下降的速度,所以不要採用這種LED模組,不然的話要把限流電阻拆掉。